PhotoRobot Cube V5 / V6 / Kompakti käyttöopas
Tämä käyttöopas sisältää tekniset ohjeet PhotoRobot Cube V5 / V6 / Compactin asennuksesta, liittämisestä ja käytöstä. Se sisältää ohjeet Cube-robotin asentamiseen pyöriväksi mallinuken vartalon pidikkeeksi. Käsikirjan tarkoituksena on tukea PhotoRobot-asiakkaita laitteen kokoonpanossa, sen ensimmäisessä käyttötarkoituksessa ja tuotantolinjan käyttäjien käyttöönotossa.

Muistiinpano: PhotoRobot-laitteen ensimmäinen asennus on aina suoritettava valtuutetun PhotoRobot-viranomaisen toimesta. Viranomaiset, joilla on lupa asentaa PhotoRobot, ovat hyväksytty jakelija tai valmistajan edustaja.
Tärkeää: Katso aina ensin PhotoRobot-turvallisuustiedot ja -ohjeet laitteen mukana toimitetun käyttöoppaan lisäksi ennen itseasennusta tai ensimmäistä käyttöä.
Cube V5 / V6 / Kompakti ensimmäinen käyttö ja asennus
Kiitos ja onnittelut PhotoRobot Cube -ostoksestasi! Laitteesi edustaa vuosikymmenten ammatillista kokemusta, tietotaitoa ja innovaatioita automatisoidusta valokuvauksesta. Jokaisen robotin suunnittelu on sinua ajatellen. Samaan aikaan ohjelmistoa kehitetään jatkuvasti – räätälöidään ainutlaatuisiin tarpeisiin ja hyödytetään samalla koko PhotoRobot-ekosysteemiä jokaisella päivityksellä.
Tervetuloa PhotoRobot. Käytä tätä Cube V5 / V6 / Compact PhotoRobot -laitteen teknistä dokumentaatiota tutustuaksesi tekniikkaan ja saadaksesi ohjeita ratkaisun kokoamisesta ja ensimmäisestä käytöstä.
1. Tuotekuvaus - Cube V5 / V6 / Compact
PhotoRobot Cube V5 / V6 / Compact -laitteet ovat yksi monipuolisimmista valokuvastudioroboteista. Jokainen kuutio voi toimia itsenäisesti tai yhdessä muiden PhotoRobot-laitteiden kanssa, ja siinä on kokoonpanot 3 eri toimintatilalle. Kuutio toimii pyörivänä valokuvausalustana, esineiden ripustustilassa ja pyörivänä mallinuken vartalon pidikkeenä.

PhotoRobot Cuben tärkeimpiä ominaisuuksia ovat:
- Itsenäinen käyttö tai käytössä yhdessä yhteensopivien PhotoRobot-laitteiden kanssa
- Nopea asennus 360 asteen levysoittimena tai objektin ripustustilassa
- Tuki mallinuken vartalon pidikkeelle tai pyörivälle alustalle
- Yhteensopiva erityyppisten ja -kokoisten valokuvausnukkejen kanssa
- Saatavana Cube V5-, V6- ja Compact-versioina monipuolisuuden lisäämiseksi
1.1. Laitteen yleiskatsaus - Cube V5 / V6 / Compact
PhotoRobot's Cube V5, Cube V6 ja Cube Compact toimivat kolmessa eri kokoonpanossa. Vakiokokoonpanoihin kuuluu laitteen käyttö pyörivänä valokuvausalustana tai esineiden ripustamiseen ilmaan valokuvia varten. Vaihtoehtoisesti on mahdollista asentaa laite pyöriväksi jalustaksi mallinuken vartalon kiinnittämistä varten.
a) 360 valokuvan / pyörivän alustan asennus:

b) 360 / pyörivä jousitustila:

c) Pyörivä mallinuken vartalon pidike:

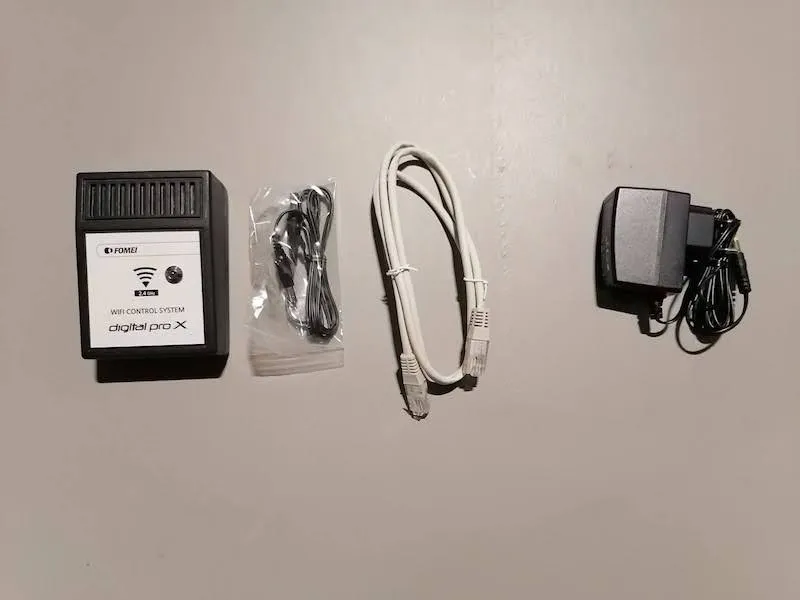
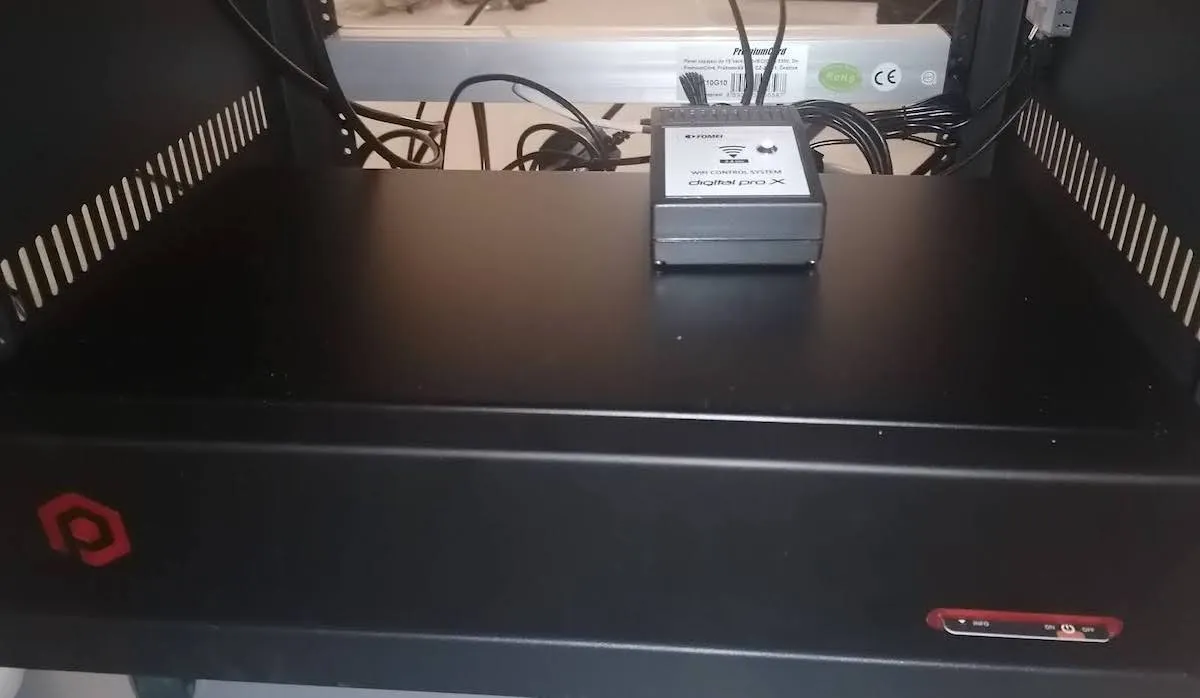
Muistiinpano: Cube V5:n ja Cube V6:n ohjausyksikkö on erillinen, mutta olennainen osa laitteita. Cube Compactissa on integroitu ohjausyksikkö koneeseen.
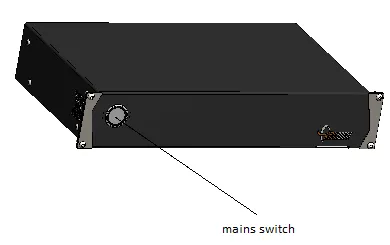
- Yllä olevassa kuvassa näkyy Cube V5 / Cube V6:n ohjausyksikkö.
1.2. Cube Compactin tekniset parametrit
Cube Compactille on seuraavat tekniset parametrit.
- Paino: 26.21 kg
- Mitat: 337,5 x 373,5 x 209,5 mm
- Virtalähde: 100 - 230 V, 50 HZ, sulake T1.6 A (230 V), T3.15 A (115 V)
- Kantavuus: 130 kg sekä ala- että yläasennuksessa
- Lähtöakselin vääntömomentti: 143,5 Nm
- Nopeus: 0 -17 1.min-1
1.3. Cube Compact -tarvikkeet
Cube Compactissa on seuraavat osat ja lisävarusteet.
a) Ripustin:

b) Pohjapohja:

c) Yläpohja:
d) Koneen jalat:

e) Levy:

f) Portaali:

1.4. Cube Compactin asennus ja käyttö ohiview
Cube Compact -lisävarusteiden lisäksi Cube Compactin asennusta ja käyttöä varten on useita kokoonpanoja. Näitä ovat seuraavat konfigurointiosat ja asetukset.
a) Pohjakiinnityslevy (laitteen kääntöpöydän tai asennusjärjestelmän kiinnittämiseen):
b) Kiinnitetty itsenäinen pyörivä alusta (kiinnitetty lattiaan vakauden lisäämiseksi):


Muistiinpano: Tässä kokoonpanossa on 95 cm:n levy, jonka pohja on kiinnitetty vakaaseen lattiapintaan. Tämä vakauttaa koneen käytön aikana ja estää kaatumisen. Sen käyttötapauksiin kuuluu pienten ja keskikokoisten esineiden esittäminen, enintään 60 - 65 cm:n kokoon asti.
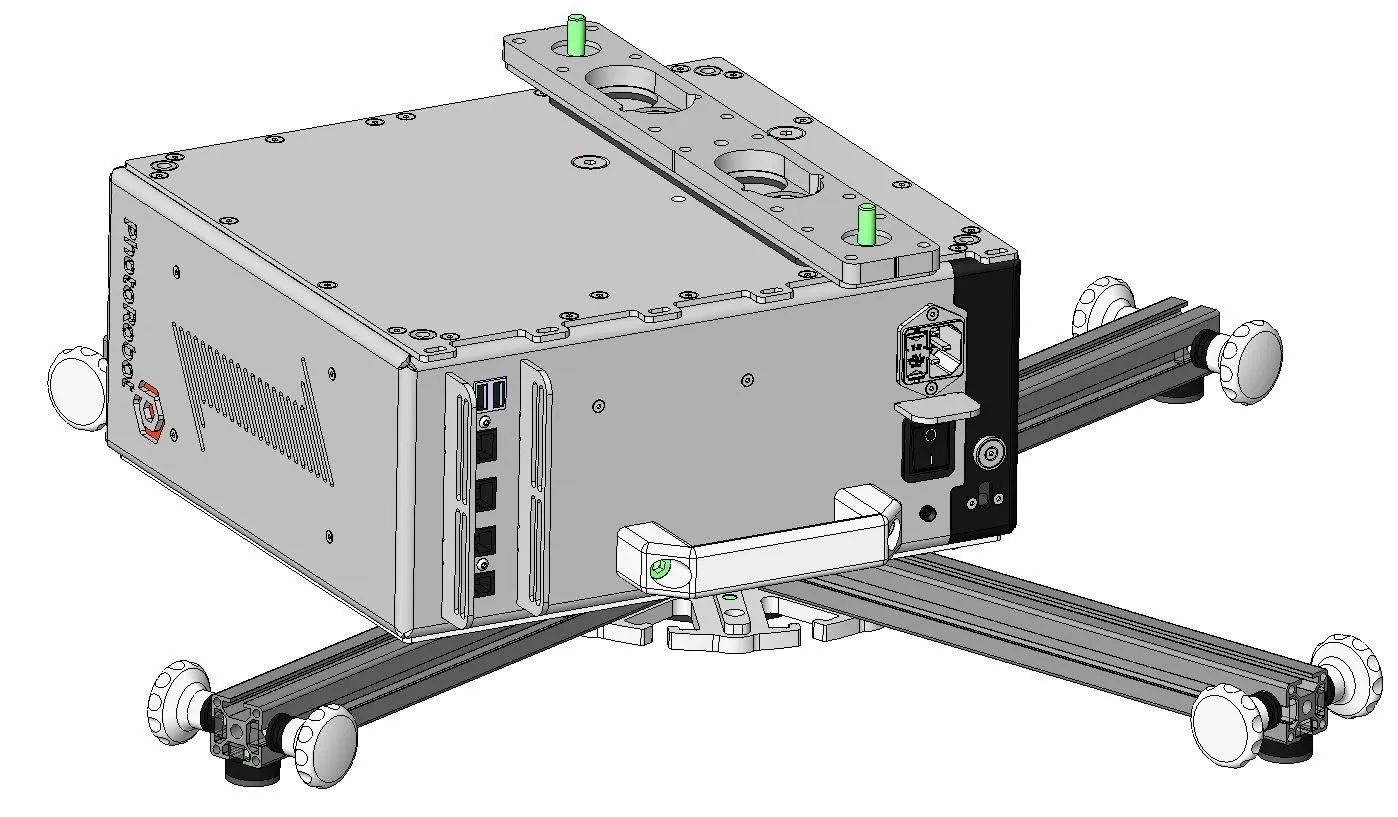
c) Vapaasti seisova pyörivä alusta (laitteen jalat käytössä):
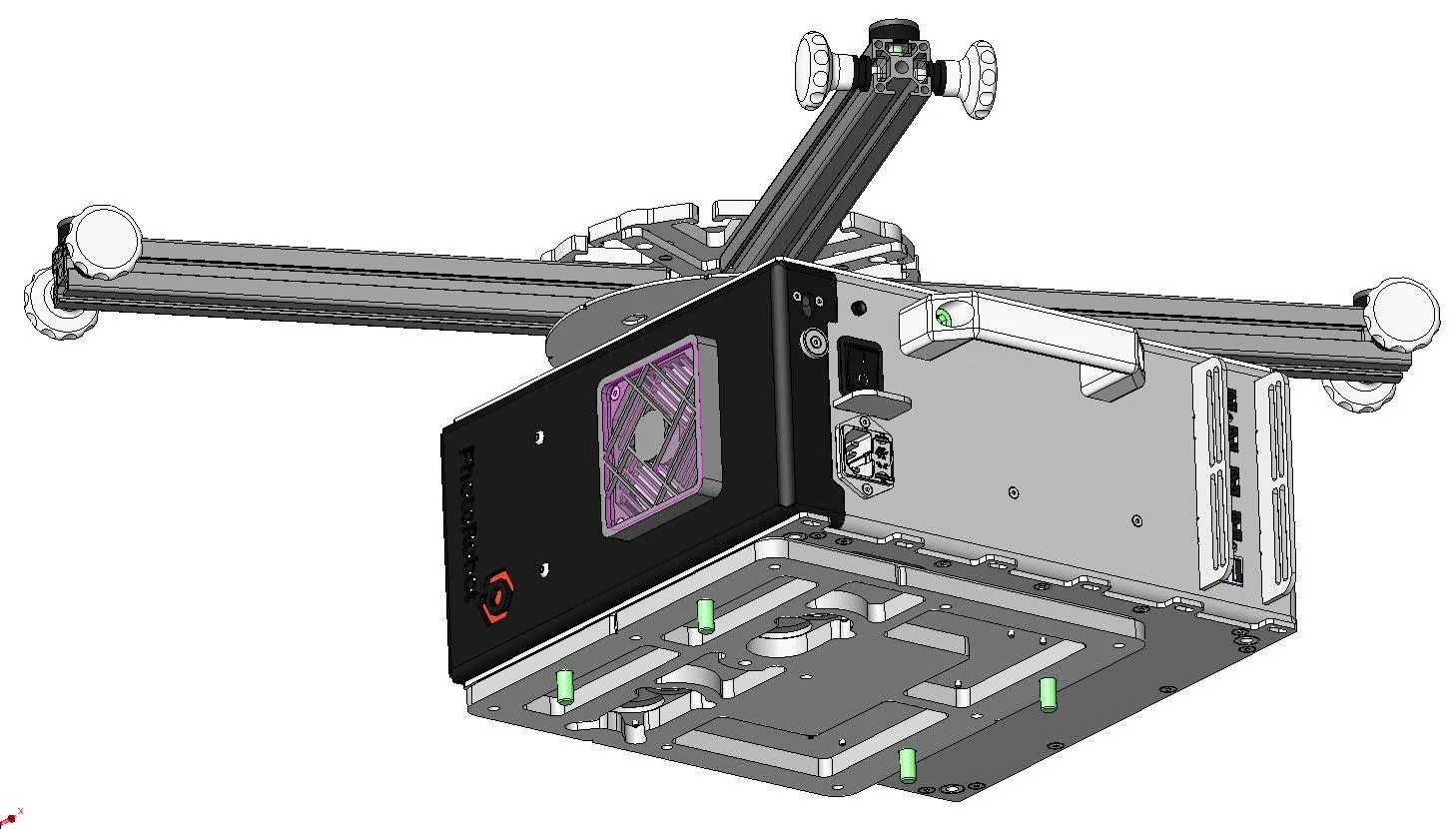
d) 360 pyörivä jousitustila (asennus ylösalaisin yläportaaliin):




1.5. Cube Compact -hätäpysäytys
Suorita hätäpysäytys irrottamalla laite sähköverkosta vetämällä virtajohto pistorasiasta.
1.6. Kuutio V5 / V6 / Kompakti huolto
Huomaa, että laite on pidettävä puhtaana ja kuivassa, ilmastoidussa ympäristössä, jossa lämpötila on vakio. Poista pöly vain mainoksellaamp liinalla, äläkä käytä kemikaaleja tai liuottimia puhdistukseen.
Suunnittelun mukaan laitteet on tarkastettava ja tarkistettava säännöllisesti paikallisen lainsäädännön mukaisesti. Elinkaarensa päätyttyä sähkölaitteet on hävitettävä asianmukaisesti luovuttamalla ne paikallisen lainsäädännön määräämään elektroniikkajätteen keräysjärjestelmään.
2. Ensimmäinen käyttökerta - PhotoRobot Cube V5 / V6 / Kompakti
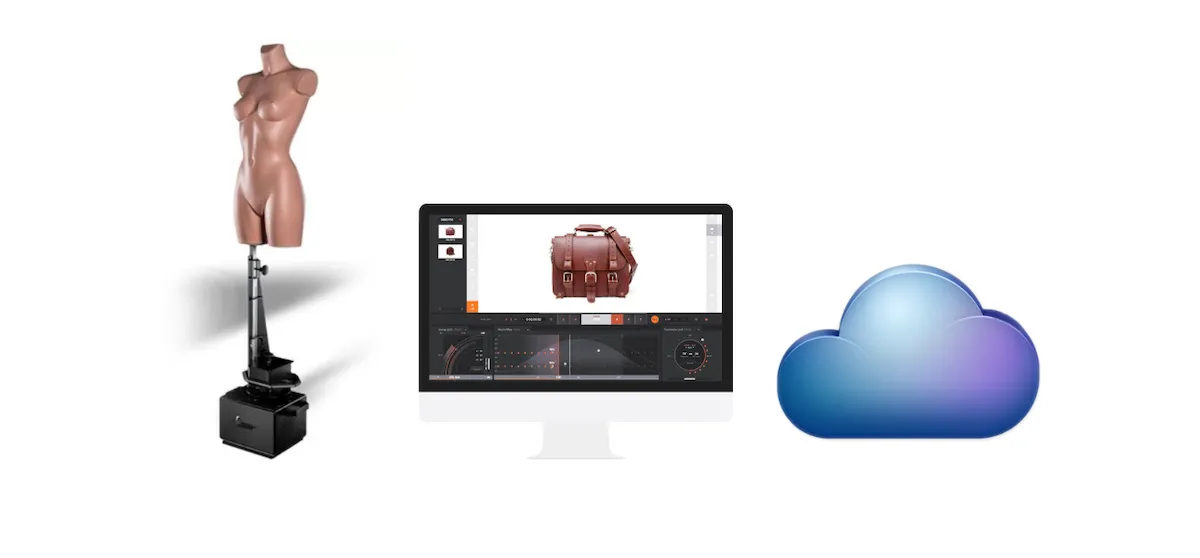
Ennen kuin käytät PhotoRobot ensimmäistä kertaa, on ymmärrettävä tekniikan taustalla oleva käsite. PhotoRobot on vallankumouksellinen all-in-one-ratkaisu tuote- ja esinekuvauksen automatisointiin. Teknisestä näkökulmasta se on modulaarinen yksikkö, joka koostuu laitteistosta ja ohjelmistosta. Siksi itse PhotoRobot on kytkettävä saman verkon kautta sitä käyttävän tietokoneen kanssa. Verkossa on myös oltava Internet-yhteys, jotta se voi käyttää pilvessä toimivia PhotoRobot-palveluita. Tällöin on aina täytettävä seuraavat vaatimukset.
- Lähiverkkoon on kytketty PhotoRobot-ohjausyksikkö.
- Tietokone tarvitaan palvelun graafisen käyttöliittymän tai operaattorin _Controls-nimisen ohjelmiston käyttämiseen.
- Tietokoneen on oltava kytkettynä samaan verkkoon PhotoRobot-ohjausyksikön kanssa.
- Verkon on oltava yhteydessä Internetiin.
Kun olet varmistanut, että PhotoRobot on kytketty tietokoneeseen ja paikalliseen verkkoon, tarkista sähkönjakelujärjestelmän parametrit (esim. voltage ja taajuus).
Tarkista sitten ohjausyksikön virta-asetukset. Sen on oltava kaikkien sähkönjakelujärjestelmän parametrien mukainen. Jos ohjausyksikön asetukset eivät ole vaatimusten mukaisia, katso seuraavaa osaa Ohjausyksikön virran asetukset.
Jos se on yhteensopiva, jatka liittämällä ohjausyksikkö verkkoon Ethernet-kaapelilla.
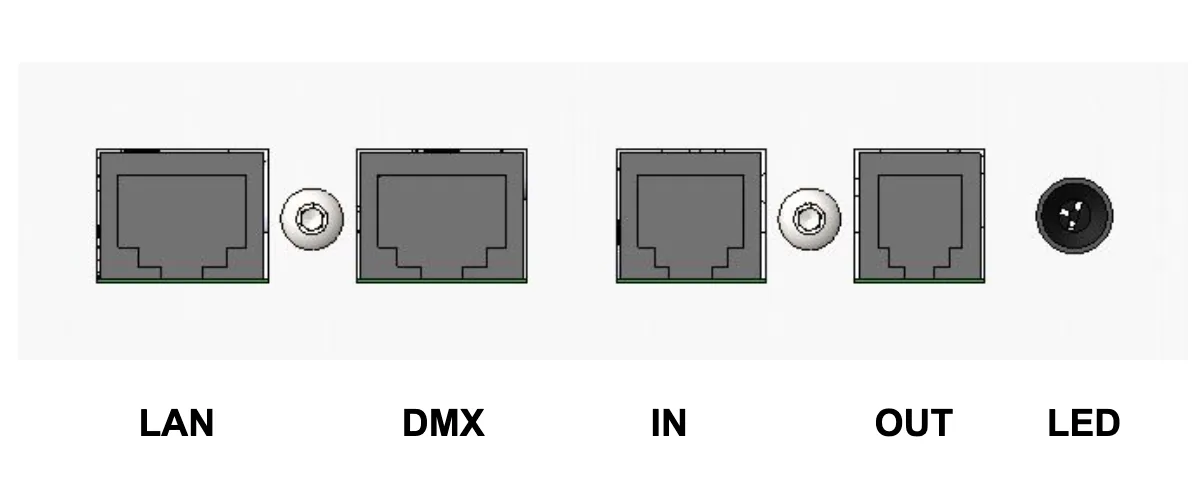
Muistiinpano: Cube V5 / V6 -malleissa ohjausyksikkö on erillinen laite. Etsi RJ45-liitin ohjausyksikön takaa. Cube Compactissa on ohjausyksikkö integroituna koneeseen. Etsi RJ45-liitin Cube-robotin takaa.
2.1. Ohjausyksikön virran asetukset
Ohjausyksikön virta-asetusten tarkistamiseksi vanhemman mallin ohjausyksikössä on manuaalinen voltage valitsin laitteen takana.

Vaihtoehtoisesti uudemman mallin ohjausyksikössä ei ole jännitevalitsinta, ja sen toiminta-alue on 110 V - 240 V.
Jos olet epävarma ohjausyksikön virta-asetuksista, ota yhteyttä PhotoRobot-tekniseen tukeen saadaksesi apua PhotoRobot-teknikolta.
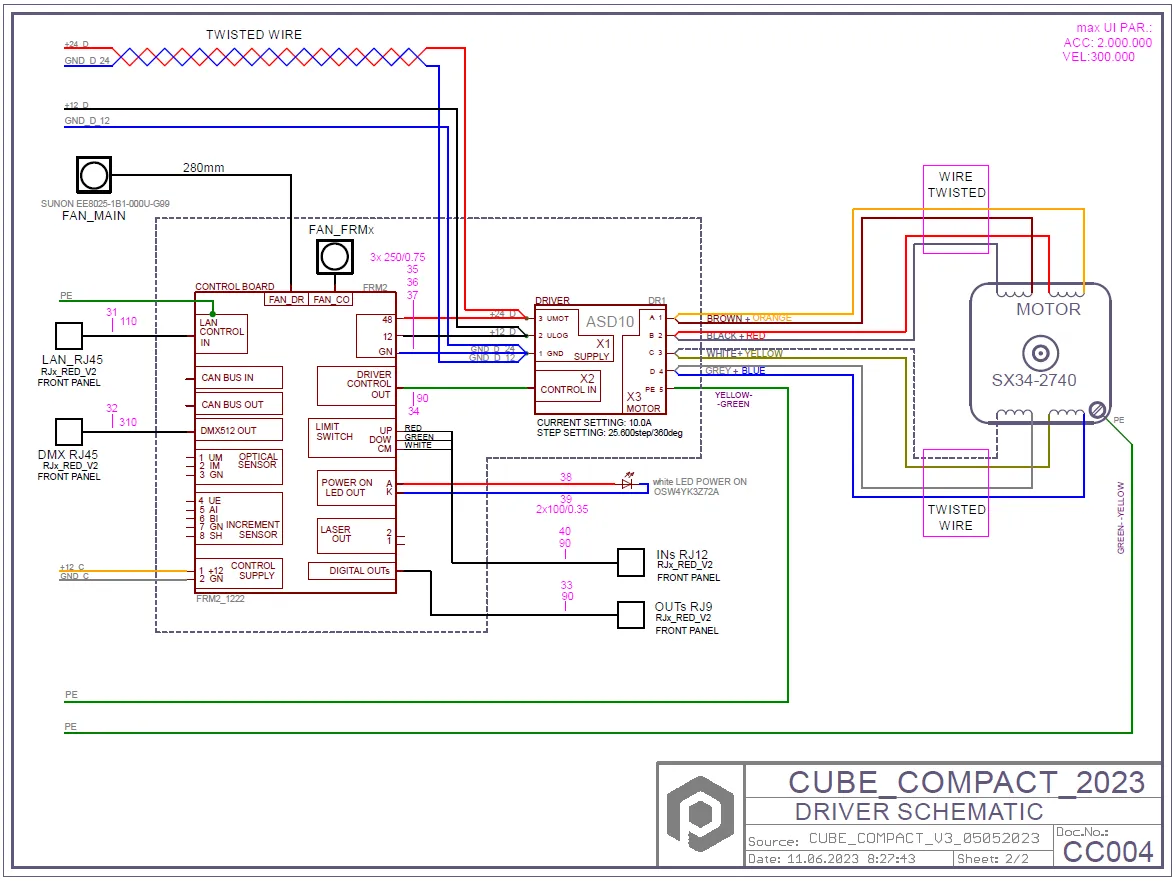
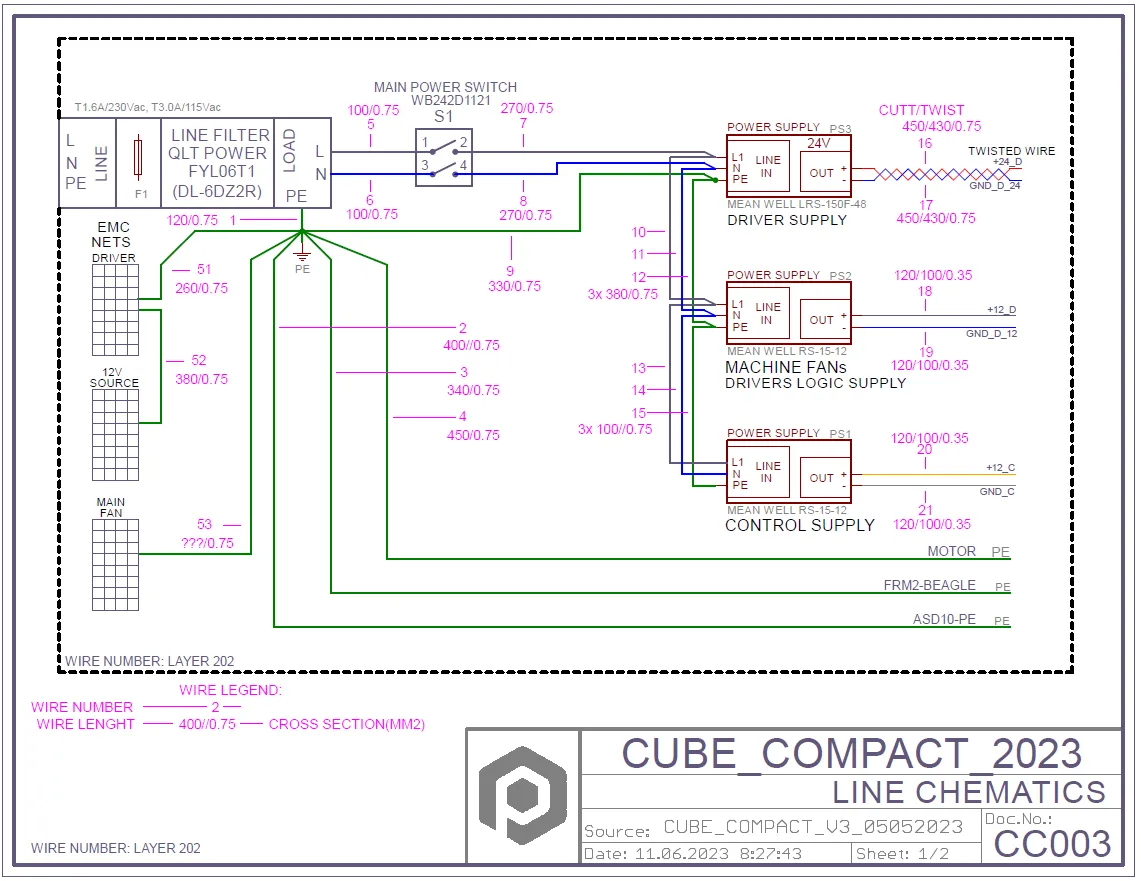
2.2. Kuution kompakti sähkökaavio
2.3. Verkon kokoonpano
Jotta verkko voidaan määrittää kommunikoimaan oikein PhotoRobot:n kanssa, verkossa on täytettävä seuraavat vaatimukset.
- DHCP-palvelin verkossa on pakollinen.
- TCP-porttien 7777 ja 7778 tiedonsiirto on sallittava.
- UDP-lähetykset portissa 6666 on sallittava
- Internet-yhteys on pakollinen.
- *. photorobot.com pääsy on sallittava.
- as-unirobot.azurewebsites.net pääsy on sallittava.
- PhotoRobot:n langallista yhteyttä lähiverkkoon suositellaan.
- Katso tarvittaessa lisätietoja kohdasta PhotoRobot Yksityiskohtaiset verkon edellytykset.
- Liitä virtapistoke pistorasiaan.
Paina seuraavaksi Cube V5 / V6:n ohjausyksikön (tai Cube Compactin takana) virtakytkintä. Tilavalo muuttuu vilkkuvasta jatkuvaksi valoksi ja ilmoittaa, kun se on käyttövalmis.
2.4. Etsi PhotoRobot:n IP-osoite lähiverkosta
Verkon asianmukaisen konfiguroinnin jälkeen on tarpeen etsiä ja tunnistaa PhotoRobotin IP-osoite lähiverkosta. Tätä varten PhotoRobot Locator -sovellus on integroitu suoraan CAPP-ohjelmistoon ohjausyksiköiden helpompaa etsintää ja tunnistamista varten verkossa. Varmista, että käytät CAPP-ohjelmiston uusinta versiota päästäksesi tähän ominaisuuteen.
Tunnistaaksesi robotin verkossa suoraan CAPPissa, avaa CAPPin paikallinen versio, siirry Asetuksiin ja napsauta Robotit / Ohjausyksiköt.

Robots / Control units -valikko näyttää sarakkeet Name, Network, Unit, Version, Discovered ja Identify jokaiselle robotille. Jos robotin nimen vasemmalla puolella oleva piste on vihreä, se on online-tilassa. Robottikentän napsauttaminen avaa robotin verkkosivuston käyttöliittymän. Tämä saa myös robotin Control Unit -yksikön LED-valon vilkkumaan vihreänä helpottaen sen tunnistamista.
Jos asiakas vaatii sovelluksen ulkoista latausta, PhotoRobot Locator on saatavilla myös iOS-lataukseen PhotoRobot-tilin latauksista.

Huomautus: PhotoRobot Locatorin Android-versio on lopetettu.
Vaihtoehtoisesti on olemassa FRFind-komentorivityökalu MacOS:lle tai Windowsille verkon etsimiseen ja PhotoRobot Control Units -yksiköiden tunnistamiseen. Löydät linkit FRfindin lataamiseen myös PhotoRobot Account Downloads -sivulta.
2.5. Perustestaus - Cube V5 / V6 / Compact
Voit testata Cube V5 / V6 / Compactia avaamalla seuraavaksi a web selain ja kirjoita PhotoRobot -laitteeseen liittyvä IP-osoite URL-muodossa. Kirjoita esimerkiksi: https://11.22.33.44 (huomaa, että tämä osoite on vain esimerkki). Jos onnistuu, peruskäyttöliittymä käynnistyy.

- Käynnistä moottorit (nuoli 1 yllä) ja yritä käyttää mitä tahansa robotin liikkuvaa osaa (nuoli 2 yllä). Jos robotti liikkuu ohjeidesi mukaan, olet valmis käyttämään PhotoRobot-laitettasi säännöllisesti.
3. Cube V5 / V6 -kokoonpano ja mallinuken vartalon pidike
Kun kokoat Cube V5- tai Cube V6 -malleja, huomaa, että erillinen ohjausyksikkö ja teline on koottava. Näin ei ole Cube Compactin kohdalla. Jos käytät Cube Compactia, siirry paperin taustan kokoamista koskevaan osioon.
3.1. HD-telineen ja ohjausyksikön kokoonpano (V5 / V6)
3.1.1. Jos haluat koota Cube V5:n ja Cube V6:n erillisen ohjausyksikön, aloita telineen kokoamisesta. Noudata tätä varten telinelaatikkoon kiinnitetyn käsikirjan ohjeita toimituksen yhteydessä.

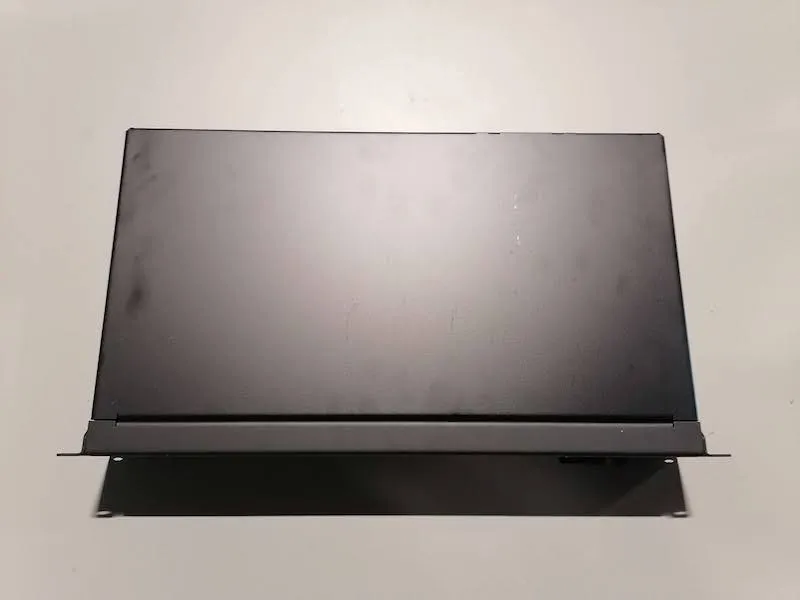
3.1.2. Etsi seuraavaksi ohjausyksikkö ja pura se pakkauksesta.

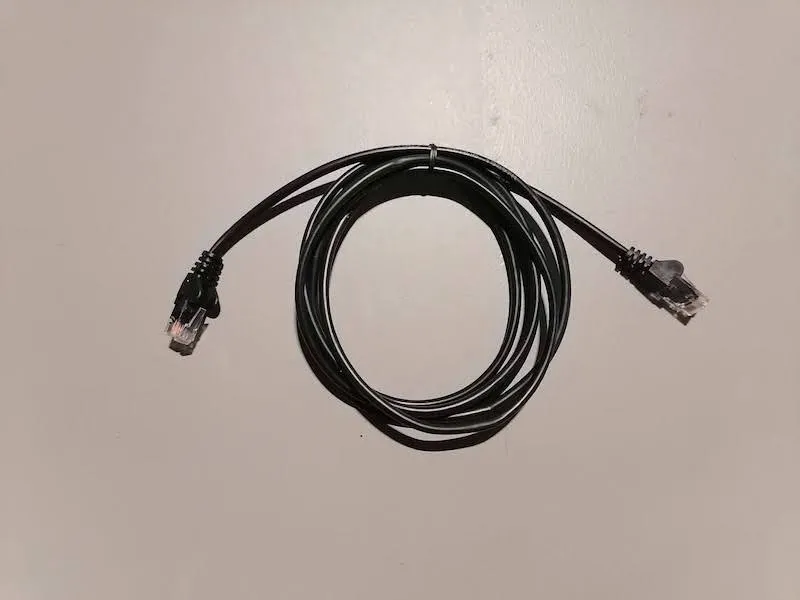
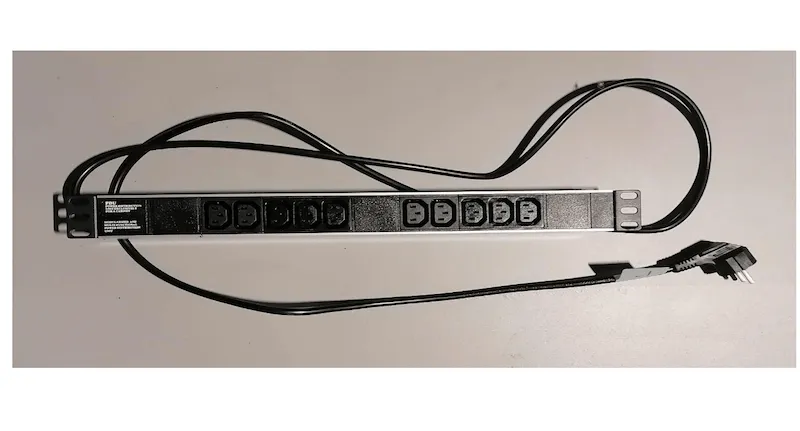
3.1.3. Valmistele sitten seuraavat kaapelit: virtajohto (pituus 1 metri), suljinkaapeli, moottorikaapeli ja ethernet-kaapeli (pituus 2 metriä).
a) Virtajohto (pituus 1 metri):

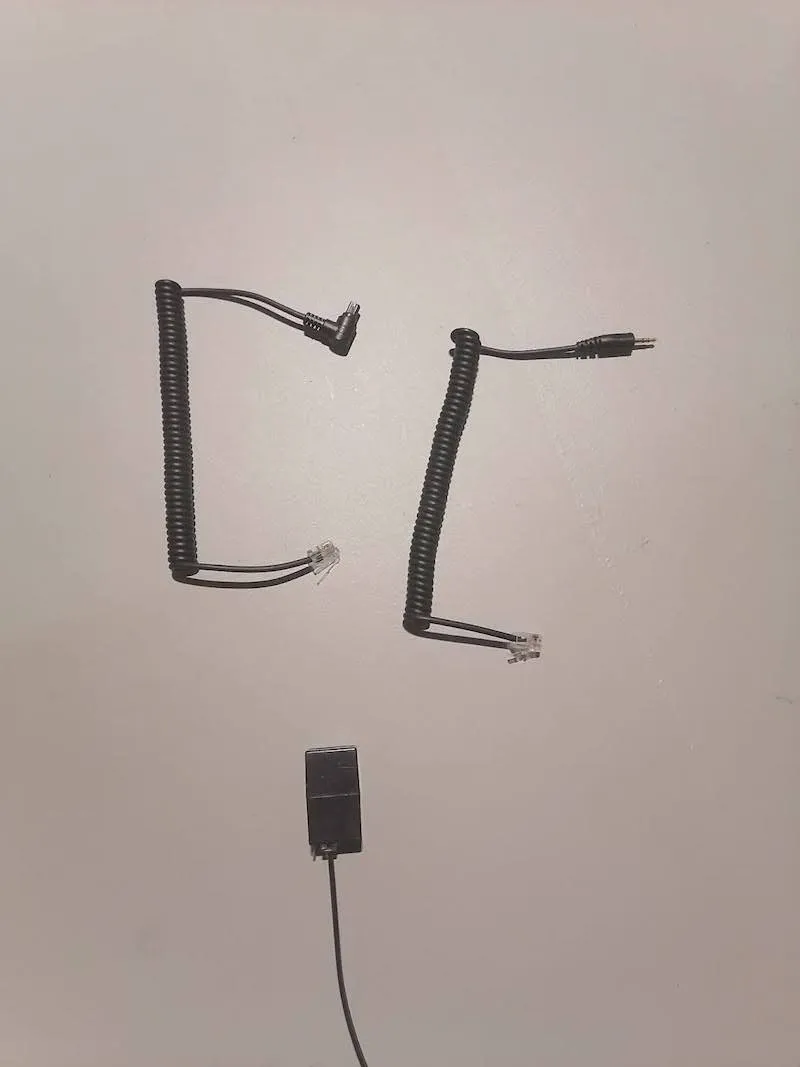
b) Suljinkaapeli (pituus 1 metri):

c) Moottorin kaapeli:

d) Ethernet-kaapeli (pituus 2 metriä):
3.1.4. Aseta jokainen edellisessä vaiheessa valmisteltu kaapeli telineeseen.
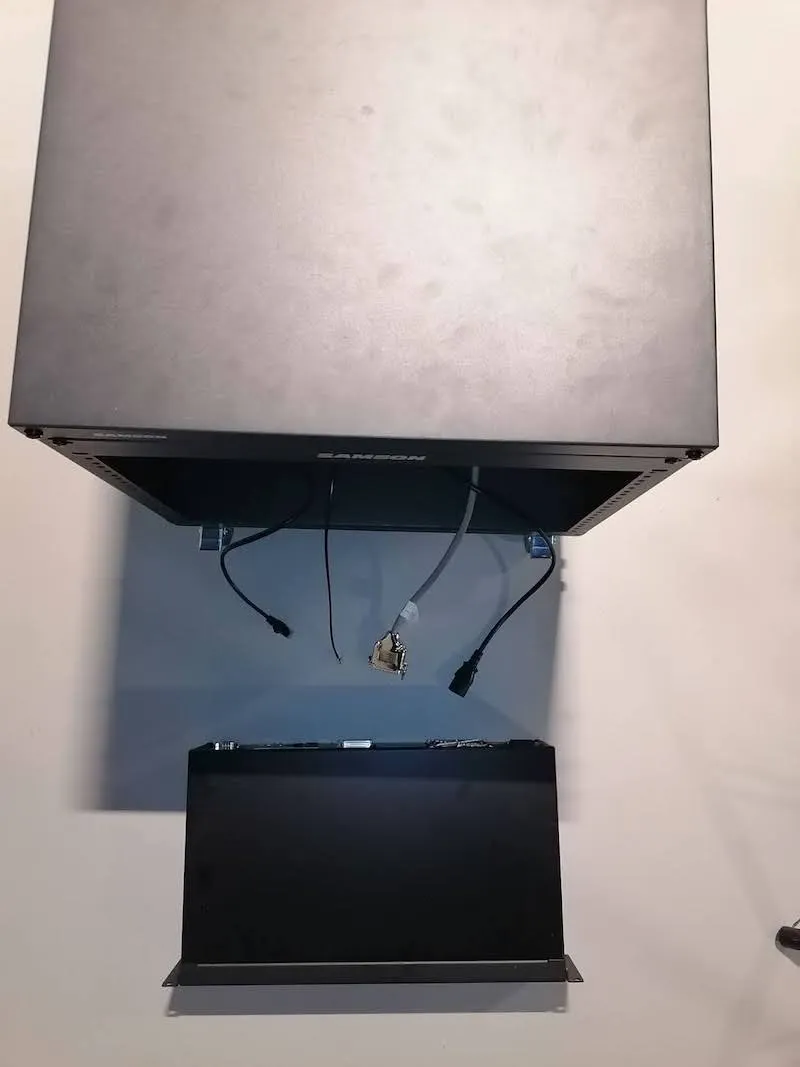
3.1.5. Liitä edellisten vaiheiden kaapelit ohjausyksikköön.

Tärkeä: Moottorikaapeli on kiinnitettävä tiukasti liittimen kahdella ruuvilla. Suljinkaapeli liitetään ohjausyksikön OUT-porttiin.
3.1.6. Aseta ohjausyksikkö telinekoteloon ja kiinnitä ruuvit sen sulkemiseksi.
3.2. Lisävarusteiden ja liitäntöjen kokoaminen
3.2.1. Liitä kaikki Cube V5 / Cube V6:n lisävarusteet purkamalla reititin pahvilaatikosta ja asentamalla sitten telineen pidikkeet. Kiinnitä seuraavaksi virtakaapelit tai sovitin (reitittimen tyypistä riippuen) ja aseta reititin telinekoteloon ennen kuin ruuvaat sen kiinni.

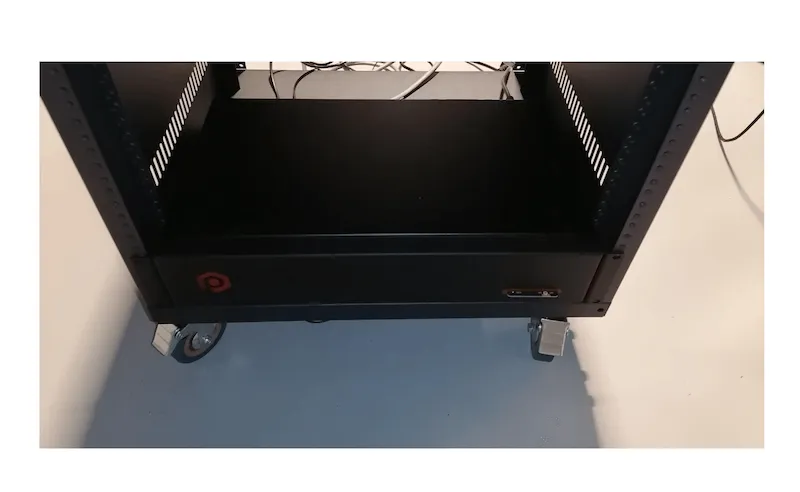
3.2.2. Kiinnitä pistorasia telineen takana olevaan alaosaan kiinnittämällä se ruuveilla.

3.2.3. Jos toimitetussa reitittimessä on virtalähde, etsi virtalähteen liitäntä ja liitä se mihin tahansa monipistorasialiittimeen.


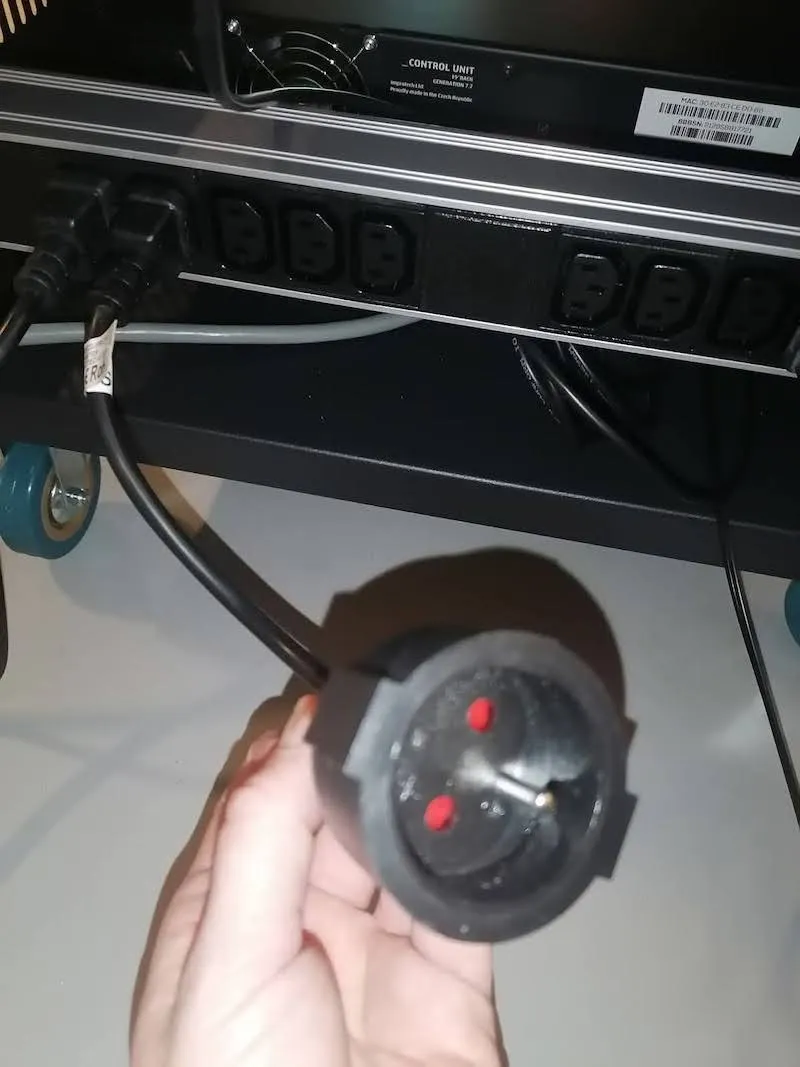

3.2.4. Etsi ohjausyksikön virtajohdon vapaa pää ja kiinnitä se pistorasiaan.
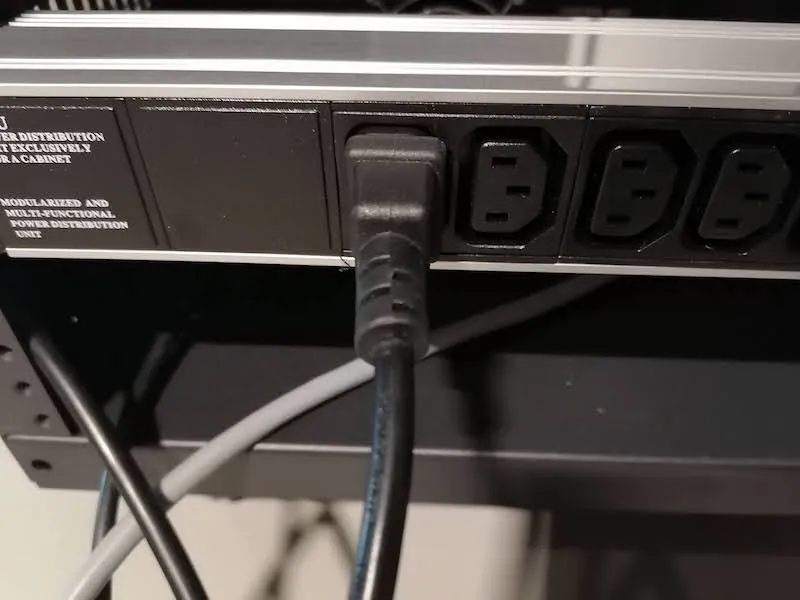
3.2.5. Liitä kaapeli studiosi pistorasiaan pisimmällä Ethernet-kaapelilla. Huomaa, että oletuksena Internet-yhteyden odotetaan olevan käytettävissä tämän pistorasian kautta, ja siksi IP-osoite saadaan automaattisesti.


3.2.6. Liitä Ethernet-kaapelin toinen pää reitittimen viimeiseen porttiin. Käytä joko porttia numero 10 tai portti numero 13 reitittimen tyypistä riippuen.
3.2.7. Liitä seuraavaksi Ethernet-kaapelin vapaa pää ohjausyksiköstä reitittimeen käyttämällä mitä tahansa porttia numero 1-9.
3.2.8. Etsi virtalähteen liitäntä ja kytke se pistorasiaan.
3.2.9. Irrota Wi-Fi-moduuli pahvilaatikosta ja etsi toinen 2 metrin Ethernet-kaapeli Wi-Fi-moduuliin liitettäväksi. Ethernet-kaapelin toinen pää kiinnittyy reitittimeen millä tahansa portilla numero 1-9.


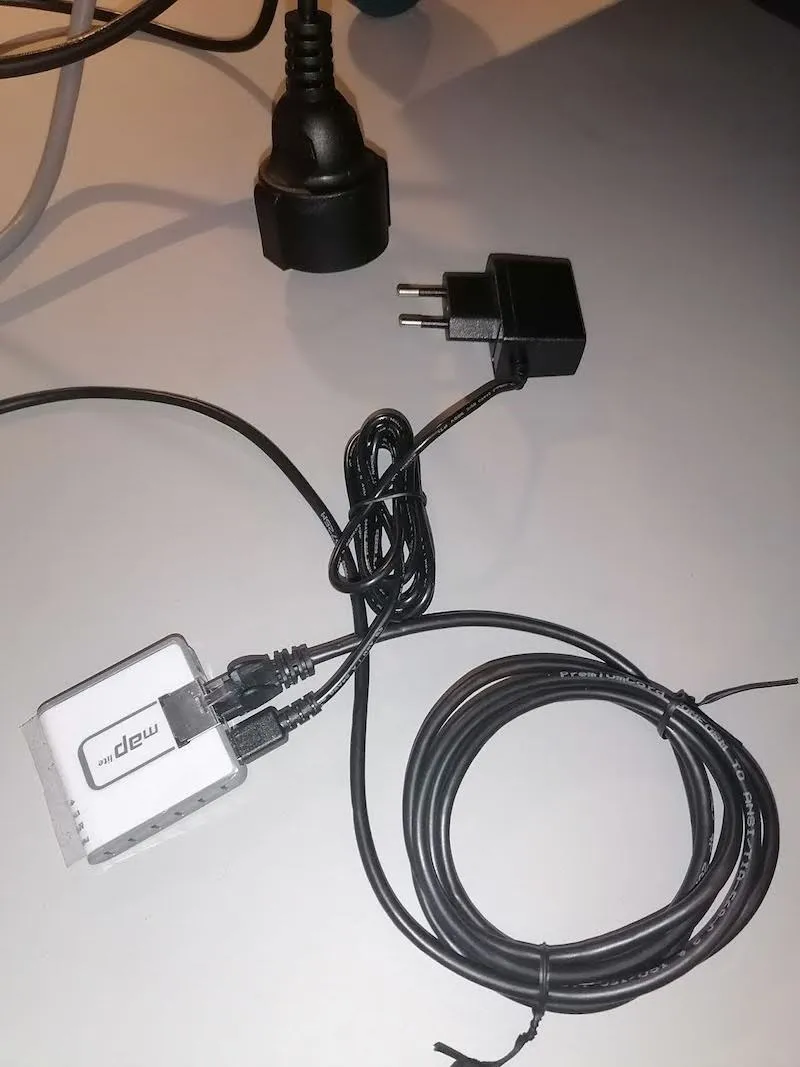

3.2.10. Seuraavaksi, jos käytät Fomei-välähdyksiä, pura Fomei Wi-Fi -muunnin ja virtalähde pakkauksesta ja liitä laitteet. Jos käytät Broncolor-valoja, katso PhotoRobot - Broncolor Lights Management.

3.2.11. Liitä virtalähteen liitäntä pistorasiaan ja liitä sitten sovitin. Kaapelin toinen pää liitetään reitittimeen millä tahansa portilla numero 1-9.

3.2.12. Liitä monipistorasiapistoke pistorasiaan.

3.2.13. Etsi kameramalliisi sopiva suljinkaapelin pääteversio ja liitä se suljinkaapelin liittimeen.


3.3. Paperin taustan kokoaminen
3.3.1. Paperitaustan kokoamiseksi etsitään ensin kaksi Master LS 13-B -valojalustaa. Asenna sitten W-2-kiinnityshaarukat laajennusnastasarjaa varten jokaisen jalustan päälle.



3.3.2 Aseta paperin tausta nastin kanssa molempien jalustan kiinnityshaarukoihin. Toinen pitää taustan vasenta puolta ja toinen taustan oikeaa puolta.

3.3.3. Katso seuraavaksi nastasarjan asennuksen kuvatallenne ja toista videon vaiheet.

3.4. Cube V5 / V6 -robotin kokoaminen
3.4.1. Jos haluat määrittää Cube-robotin tukemaan pyörivää mallinuken vartalon pidikettä, aloita purkamalla robotti pakkauksesta ja kiinnittämällä sen neljä jalkaa laitteen pohjaan.


3.4.2. Liitä seuraavaksi moottorikaapelin toinen pää kuutioon ja kiinnitä molemmat ruuvit liittimeen.


3.4.3. Kun olet liittänyt laitteen, aseta Cube-robotti maahan valkoisen taustan keskelle. Aseta kuutio 1 metrin päähän paperista.
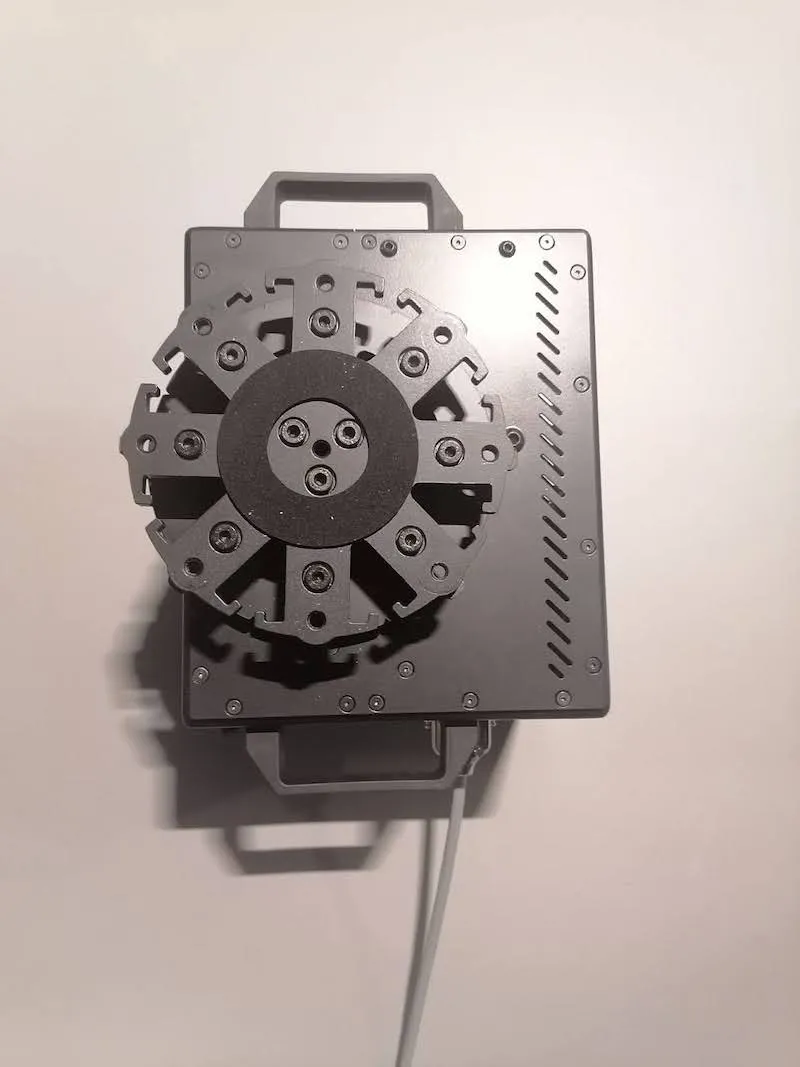

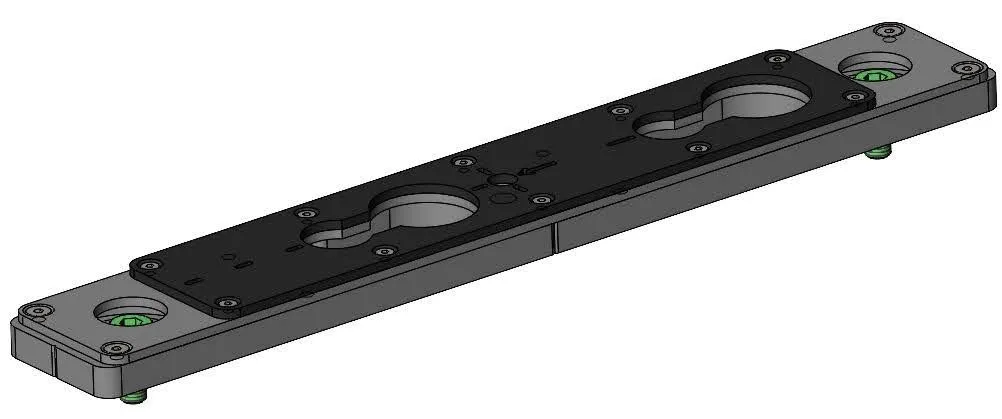
3.4.4. Aseta ylävartalon pidikkeen alennuslevy Cube-robotin päälle ja kiinnitä se paikalleen neljällä mukana toimitetulla ruuvilla.
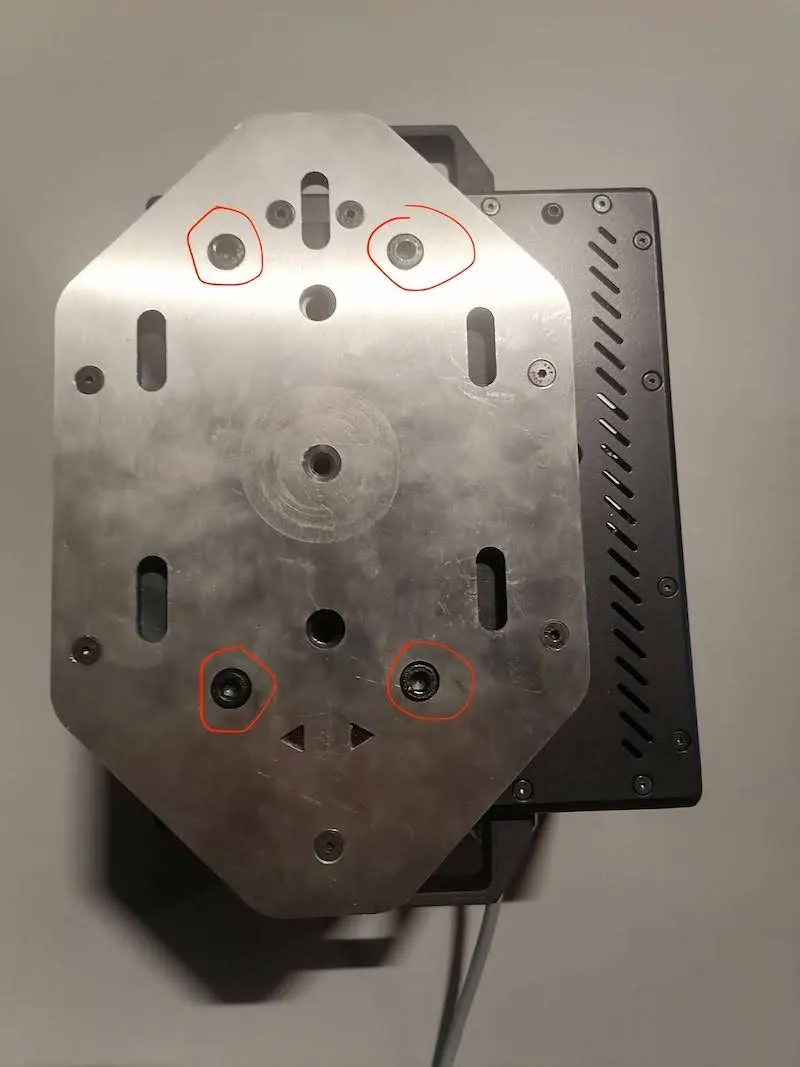
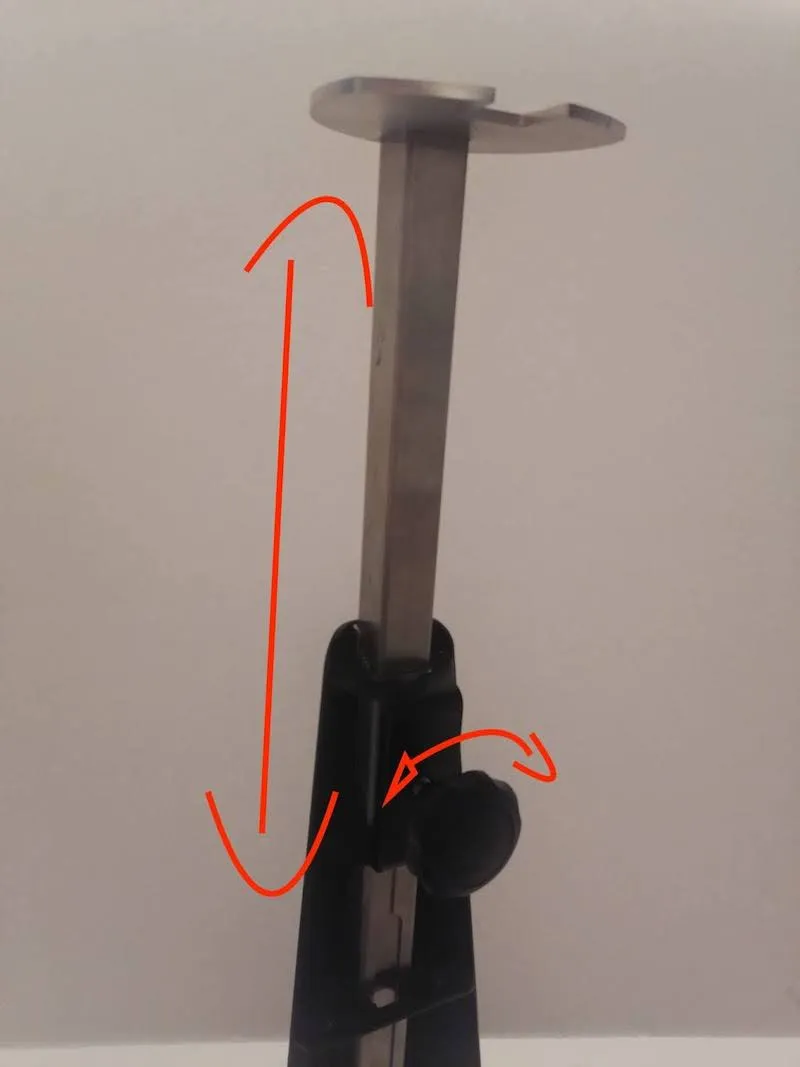
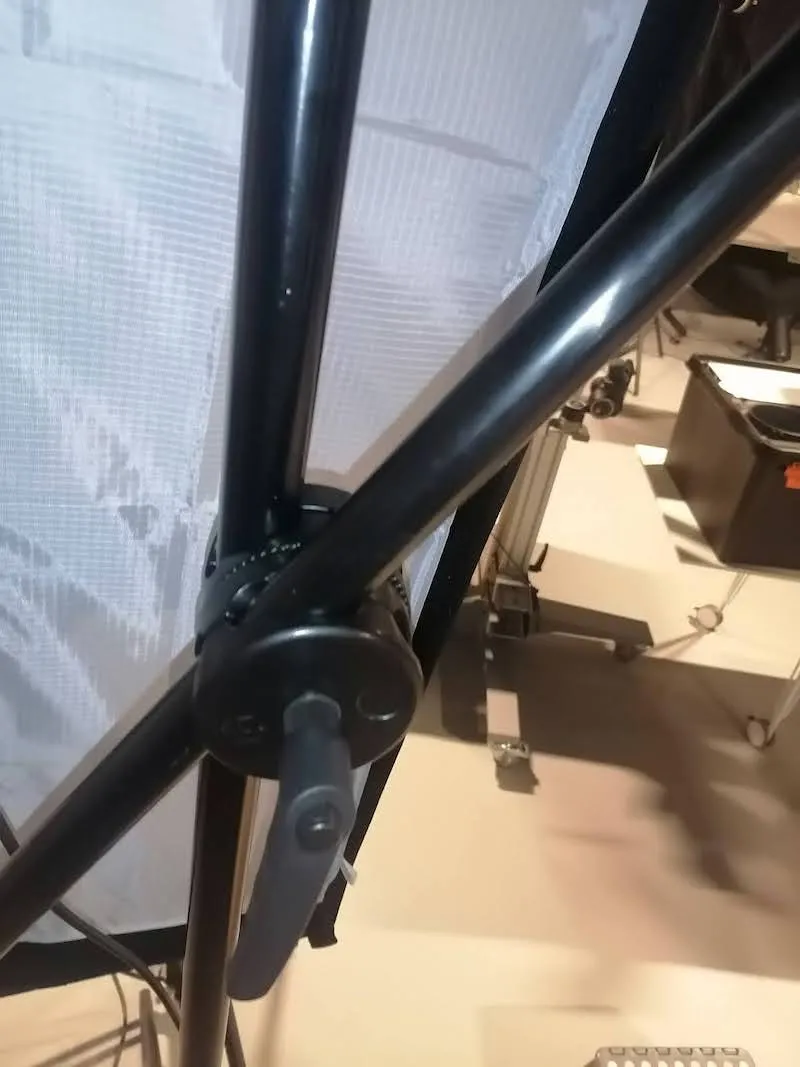
3.4.5 Aseta vartalon pidikkeen runko supistuslevylle ja kiinnitä ylävartalon pidike paikalleen suurella käsiruuvilla.


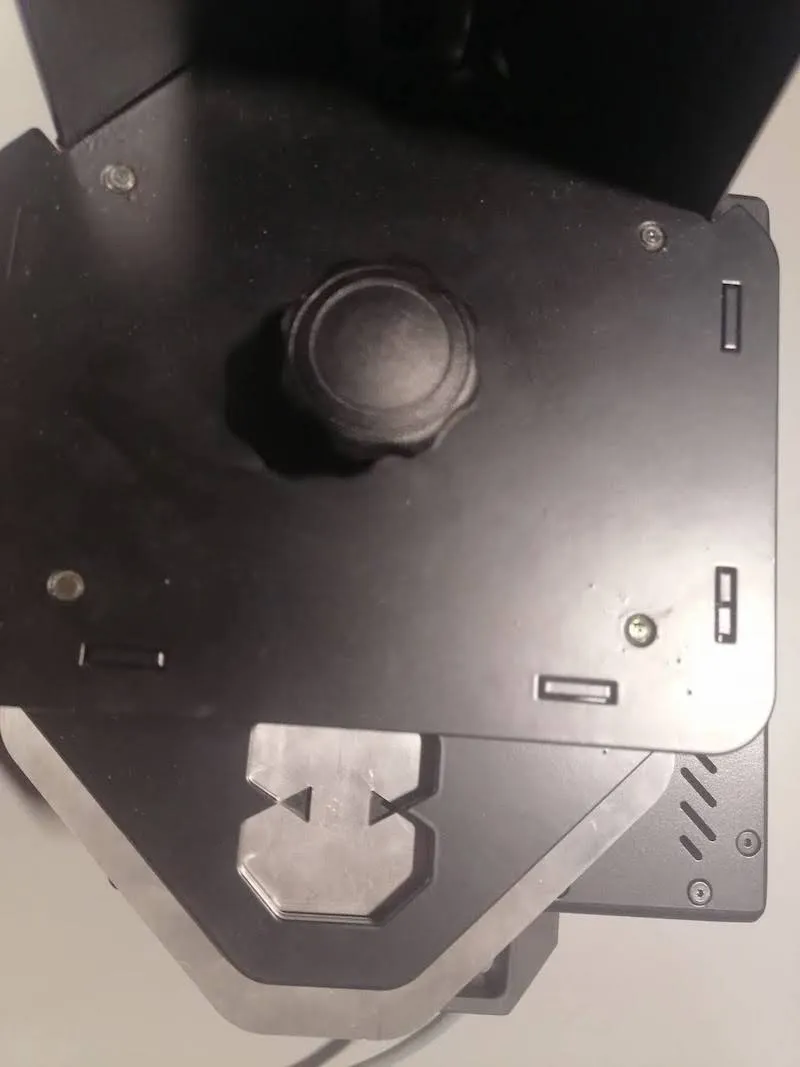
Tärkeä: Tähän vaiheeseen on kiinnitettävä erityistä huomiota. Varmista, että pienennyslevyn kolmiosymbolit näkyvät ylävartalon pidikkeen läpi. Tämä tarkoittaa, että vartalon pidike on asennettu oikein.
3.4.6 Huomaa tässä vaiheessa, että ylävartalon korkeutta voidaan säätää löysäämällä ja kiristämällä käsiruuvia ja liu'uttamalla jatketta korkeammalle tai alas.
3.5. Salamavalojen asetukset
3.5.1. Jos haluat asentaa salamavalot Cube-robotilla, pura ensin salamavalot laatikosta ja aseta sitten ohjauslamppu jokaiseen taskulamppuun.


Muistiinpano: Aseta ohjauspolttimo paikalleen ruuvaamalla lasi varovasti irti pääosasta. Tee sitten sama päälampun lasisuojalle, ennen kuin otat ohjauspolttimon pois pahvilaatikosta. Muista käyttää lautasliinaa tai liinaa käsitellessäsi ohjauslamppua, muuten sen käyttöikä voi lyhentyä huomattavasti. Aseta seuraavaksi ohjauspolttimo liitäntään täsmälleen seuraavissa kuvissa esitetyssä asennossa.




Kun olet valmis, muista laittaa lasisuoja takaisin paikalleen ja toista sitten edelliset vaiheet kunkin valon kokoamiseksi.

3.5.2. Kun olet asentanut ohjauspolttimot ja vaihtanut niiden lasisuojat, liitä virtajohdot kaikkiin taskulamppuihin.


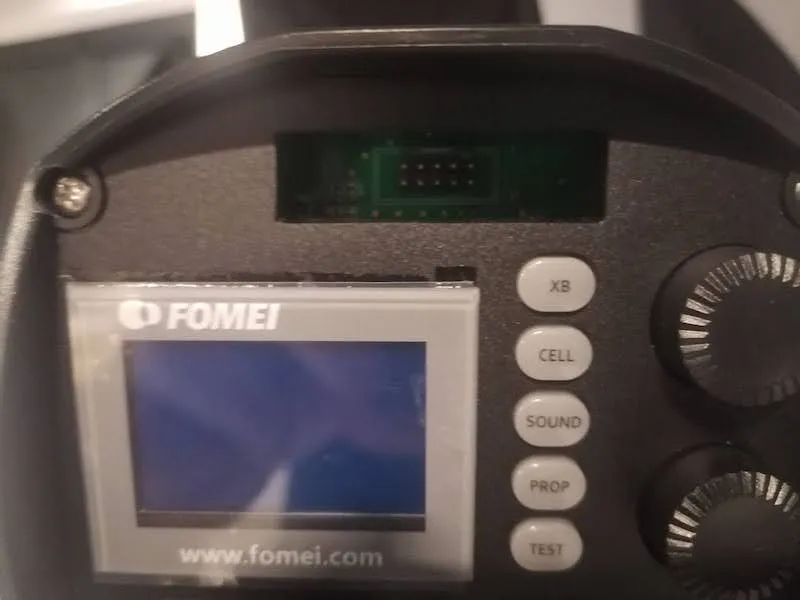
3.5.3. Aseta sitten vastaanottimet jokaiseen valoon ja huomioi FOMEI-merkinnät suunnan saamiseksi.


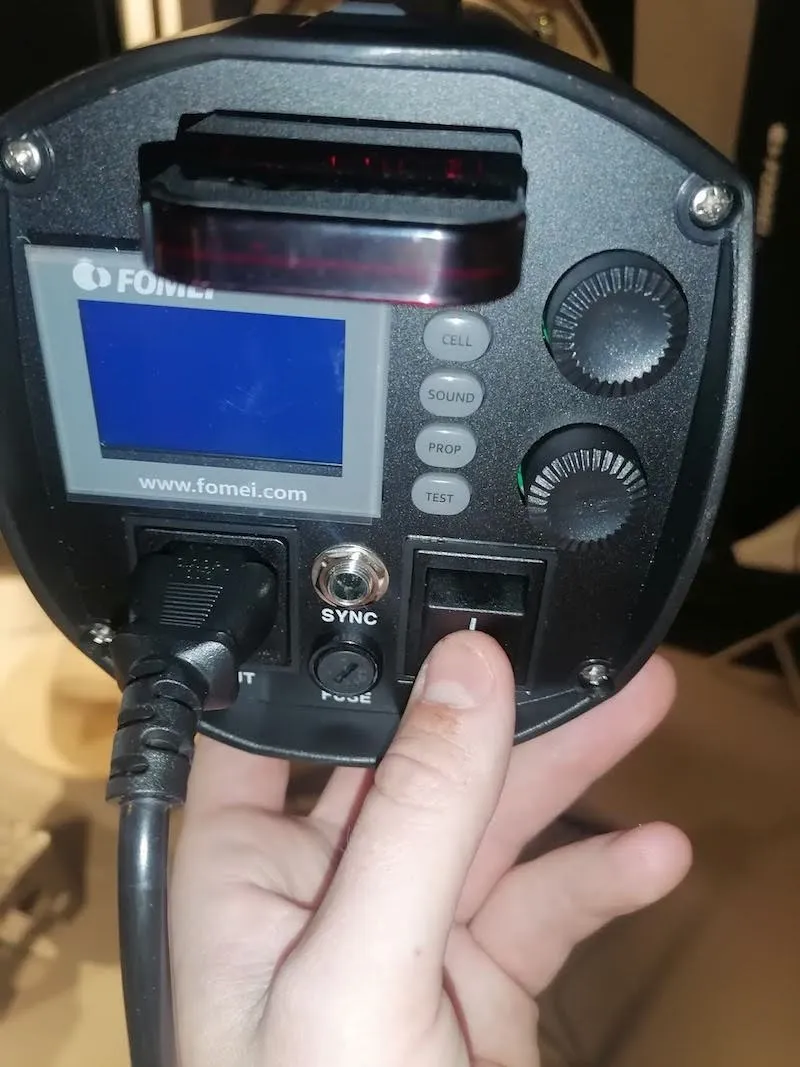
3.5.4. Kytke virtajohtojen vapaat päät valoista pistorasiaan.


3.5.5. Kytke kaikkien salamavalojen virta päälle.

3.5.6. Aseta valot fyysisesti robotin ympärille seuraavilla suositelluilla valoasetuksilla.
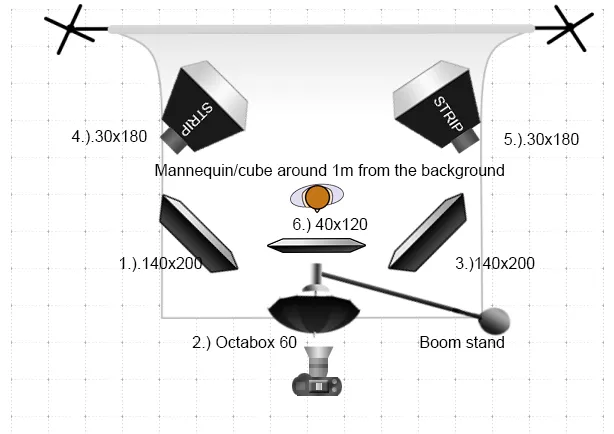
3.5.7. Huomaa, että jos puomiteline asennetaan suositellun valaisinkokoonpanon mukaisesti, puomin jalusta on ensin rakennettava. Puomitelineen rakentamiseen tarvitset jalustan, 1,5 metrin seinäpuomitangon ja seinäpuomisarjan.



Katso lisäksi seuraavista kuvista puomitelineen rakentaminen.
a) Seinäpuomin pylväspuristin:
b) Tasapainottava paino tangon päässä valon tukemiseksi:

c) Havainnollistava kuva rakennetusta puomitelineestä:

4. PhotoRobot _Controls ohjelmisto
Ohjelmisto PhotoRobot _Controls App mahdollistaa koko Cube V5 / V6 / Compact -robottityöaseman hallinnan. Tämä sisältää kaikkien robottien, kameroiden ja valaistuksen kauko-ohjauksen. Ohjelmisto hallitsee työnkulkua ja tarjoaa tarvittavat toiminnot tehokkaaseen automatisointiin jälkikäsittelyn alalla.
PhotoRobot _Controls App -ohjelmisto on ladattavissa PhotoRobot-tilisi kautta. Se ei sisälly koneen toimitukseen. PhotoRobot _Controls App -ohjelmisto ostetaan erikseen laitteesta.
Lisäksi, kun olet käynnistänyt ohjelmistosovelluksen, muista, että käyttöliittymä saattaa käynnistyä automaattisesti "ohjatussa tilassa". Ohjattu toiminto on yksinkertaistettu käyttöliittymä. Se mahdollistaa esimerkiksi viivakoodien skannauksen esineiden tunnistamiseksi ja sieppaus- ja jälkikäsittelyjaksojen automaattiseksi aloittamiseksi.
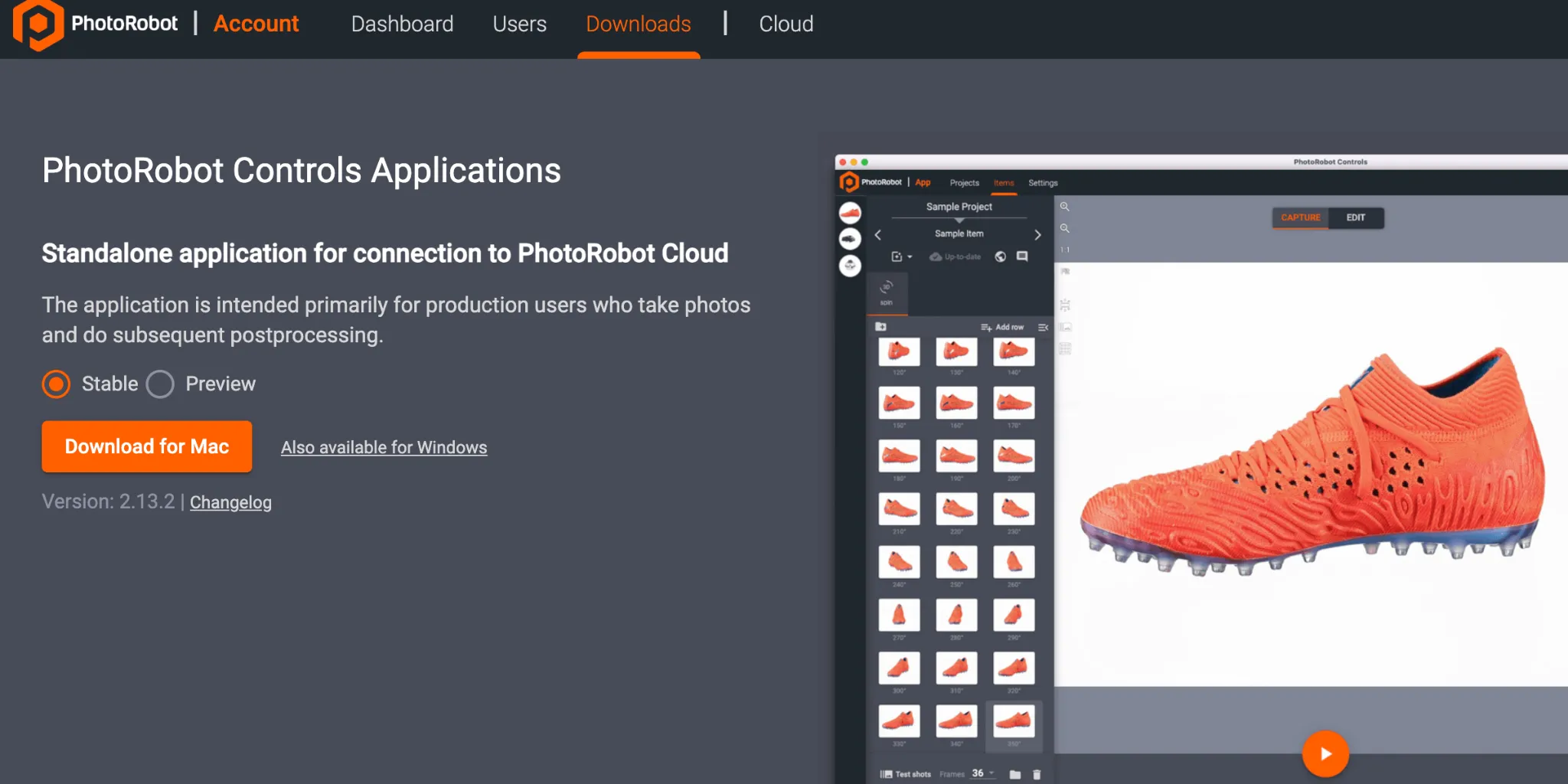
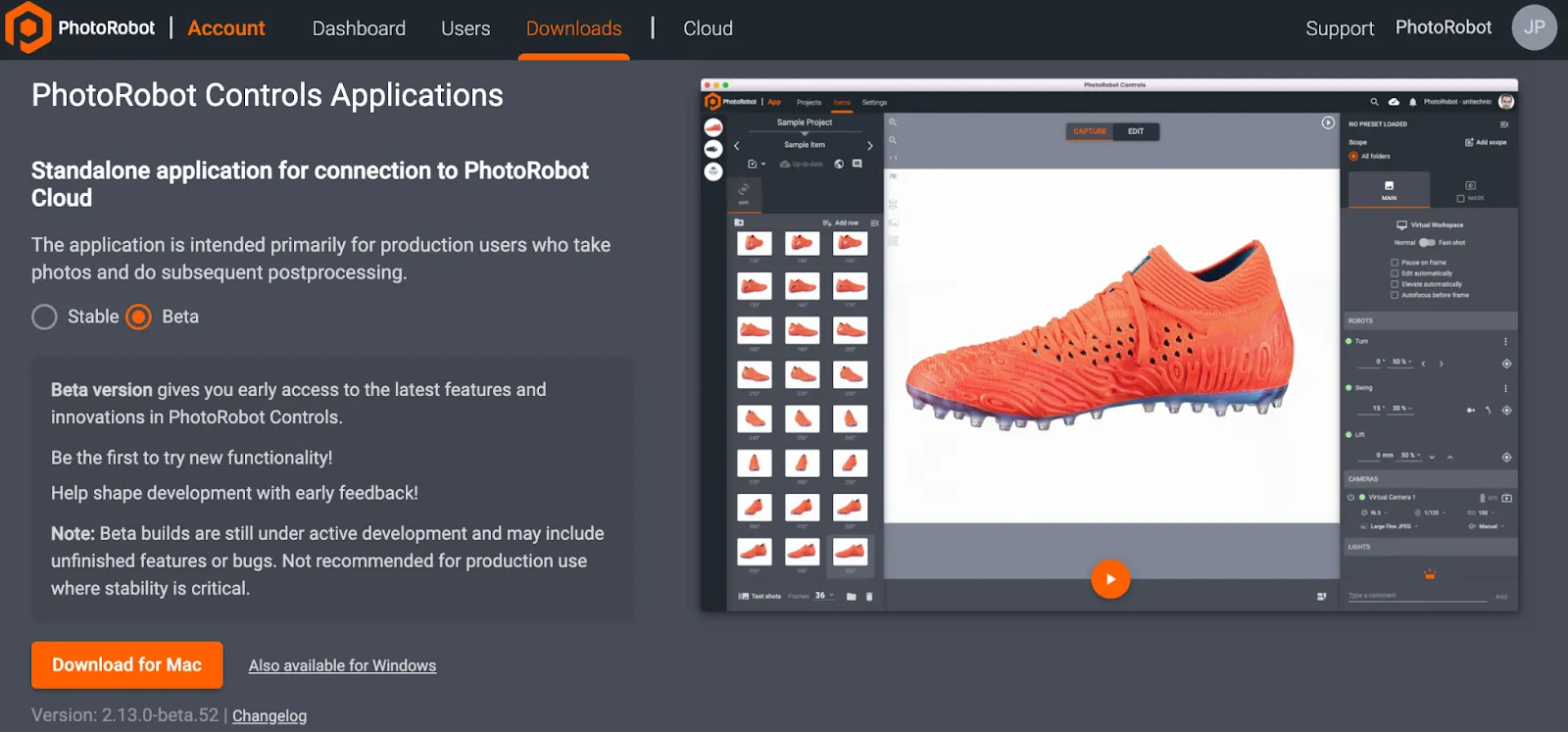
Muistiinpano: Sekä CAPP:n vakaa versio että esikatseluversio ovat ladattavissa ohjatun asennustoiminnon kautta. Vakaa versio sisältää CAPP:n uusimman version, ja se saa usein versiojulkaisuja. Samaan aikaan CAPP:n esikatseluversio tarjoaa varhaisen pääsyn uusimpiin ominaisuuksiin ja korjauksiin, jotka siirtyvät vakaaseen versioon muutamassa päivässä kehityksestä. Näin käyttäjät voivat testata esikatseluversiossa ilmeneviä ongelmia ennen yhteydenottoa tukeen, koska useimmat vakaan version raportoidut ongelmat on jo ratkaistu esikatseluversiossa. Huomaa kuitenkin, että esikatseluversiota ei suositella tuotantokäyttöön, jossa vakaus on kriittinen tekijä. Esikatseluversio on aktiivisessa kehityksessä, joka voi edelleen sisältää epätäydellisiä ominaisuuksia tai ratkaisemattomia virheitä.
Tärkeä: CAPP:n vanhempia versioita ei ole tarkoitettu asiakas- tai julkiseen jakeluun tietokannan vioittumisen riskin vuoksi. CAPP:n vanhemmat versiot ovat vain valtuutettujen PhotoRobot-teknikoiden käytettävissä sisäistä kehitystä tai erittäin erityisiä käyttötapauksia varten. Löydät CAPP:n uusimman vakaan version ja esikatseluversion kohdasta CAPP:n uusimmat latausversiot.
Lisätietoja PhotoRobot _Controls sovelluksen tuesta tai vianmäärityksestä on kohdassa PhotoRobot Aloittaminen.
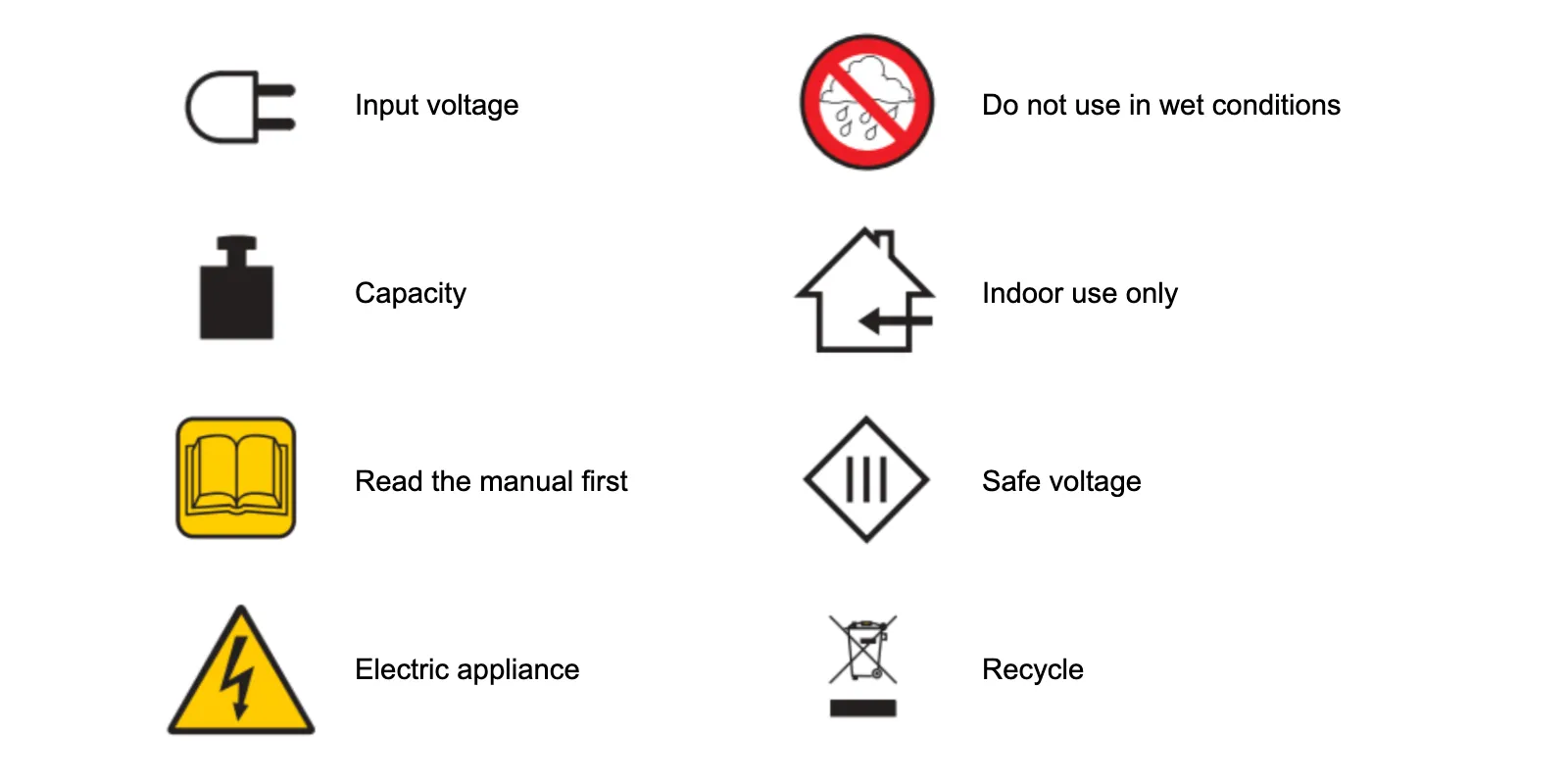
5. Tietomerkinnät
5.1. Symbolien yleiskatsaus
5.2. Cube Compact -etiketit



EOS Rebel -sarja


EOS-DSLR-sarja


Peilitön EOS M -sarja


PowerShot-sarja


Lähikuva / Kädessä pidettävä

Canon EOS Rebel -sarja tarjoaa aloittelijaystävällisiä DSLR-kameroita, joissa on vankka kuvanlaatu, intuitiiviset säätimet ja monipuoliset ominaisuudet. Nämä kamerat ovat ihanteellisia valokuvauksen harrastajille, ja niissä on luotettava automaattitarkennus, kääntyvät kosketusnäytöt ja Full HD- tai 4K-videotallennus.
Yhteys
Resoluutio (MP)
Päätöslauselma
Canon EOS DSLR -sarja tarjoaa korkealaatuisia kuvia, nopean automaattitarkennuksen ja monipuolisuuden, joten se sopii erinomaisesti sekä valokuvaukseen että videotuotantoon.
Yhteys
Resoluutio (MP)
Päätöslauselma
Peilittömässä Canon EOS M -sarjassa yhdistyvät kompakti muotoilu ja DSLR-kameran suorituskyky. Vaihdettavilla linsseillä, nopealla automaattitarkennuksella ja korkealaatuisilla kuvakennoilla varustetut kamerat sopivat erinomaisesti matkailijoille ja sisällöntuottajille, jotka etsivät siirrettävyyttä kuvanlaadusta tinkimättä.
Yhteys
Resoluutio (MP)
Päätöslauselma
Canon PowerShot -sarja tarjoaa pienikokoisia ja käyttäjäystävällisiä kameroita satunnaisille ampujille ja harrastajille. Mallit vaihtelevat yksinkertaisista osoita ja ammu -kameroista edistyneisiin zoom-kameroihin, joten ne tarjoavat mukavuutta, vankkaa kuvanlaatua ja ominaisuuksia, kuten kuvanvakaimen ja 4K-videon.
Yhteys
Resoluutio (MP)
Päätöslauselma
Canonin lähikuva- ja kädessä pidettävät kamerat on suunniteltu yksityiskohtaisiin lähikuvauksiin ja videoihin. Ne ovat pienikokoisia ja helppokäyttöisiä, ja niissä on tarkka tarkennus, korkearesoluutioinen kuvantaminen ja monipuoliset makro-ominaisuudet, jotka sopivat täydellisesti vloggaamiseen, tuotekuvaukseen ja luoviin lähikuviin.
Yhteys
Resoluutio (MP)
Päätöslauselma


