Aloittaminen - PhotoRobot käyttäjätuki
PhotoRobot Controls App (jäljempänä ”CAPP”) on suunniteltu automatisoimaan sisällöntuotantoprosesseja (kuvat, videot, 360-kuvat ja 3D-mallit). Tämä opas koostuu neljästä osiosta, joista jokainen edustaa prosessia.
- ASETUKSET - Luo työtila: kamerat, laitteisto ja projektit
- CAPTURE - Ohjaa PhotoRobot laitteistoa ja kameroita, kaappaa kuvia ja videoita
- EDIT - Prosessin jälkeinen visuaalinen sisältö
- PUBLISH - Luo tulostekuvia useissa muodoissa, "hallitse profiileja"
PhotoRobot Controls -sovelluksen asentaminen
Asenna PhotoRobot Controls -sovellus tietokoneellesi kirjautumalla sisään PhotoRobot-tilillesi ja siirtymällä PhotoRobot-latauksiin.
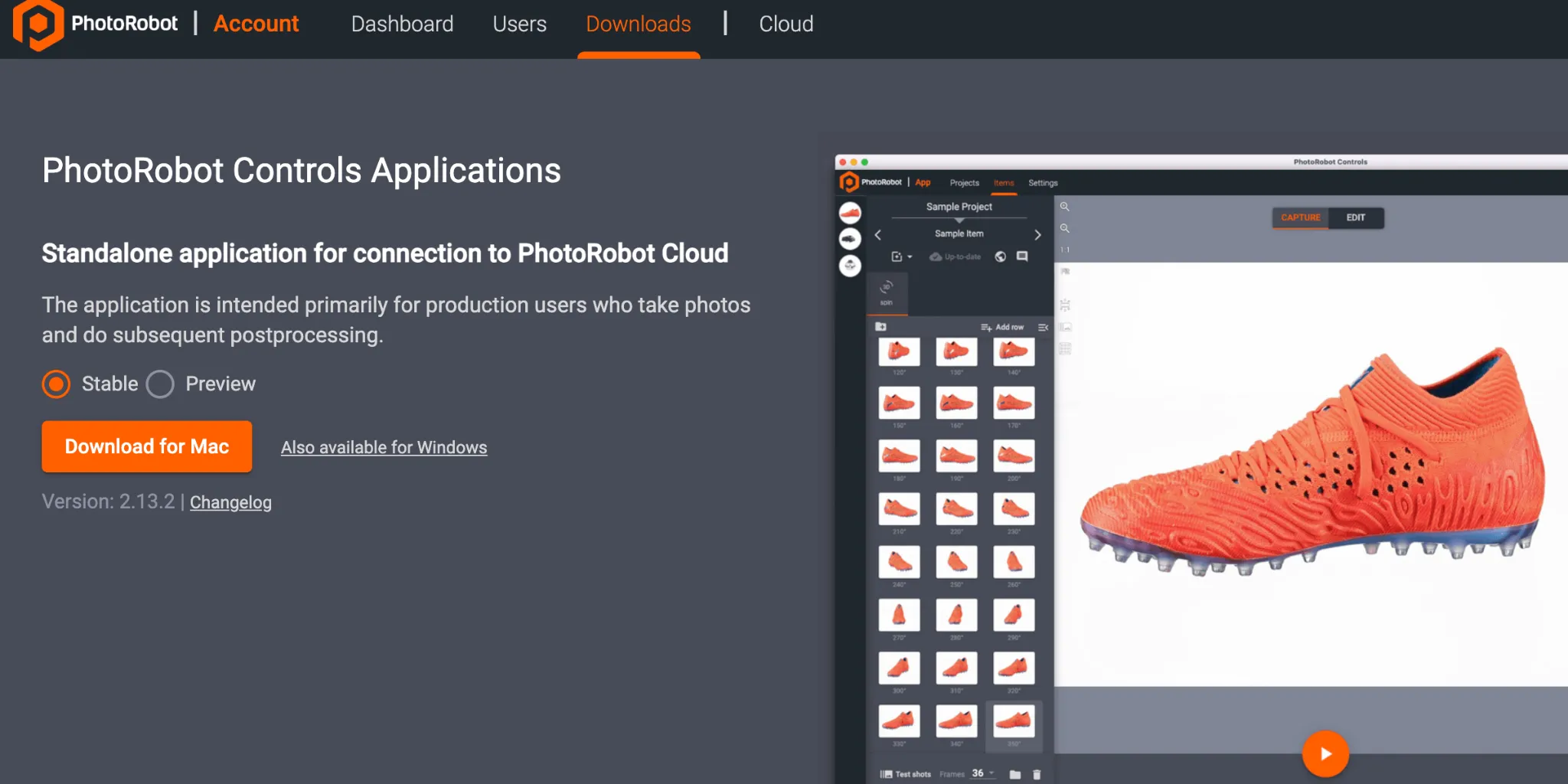
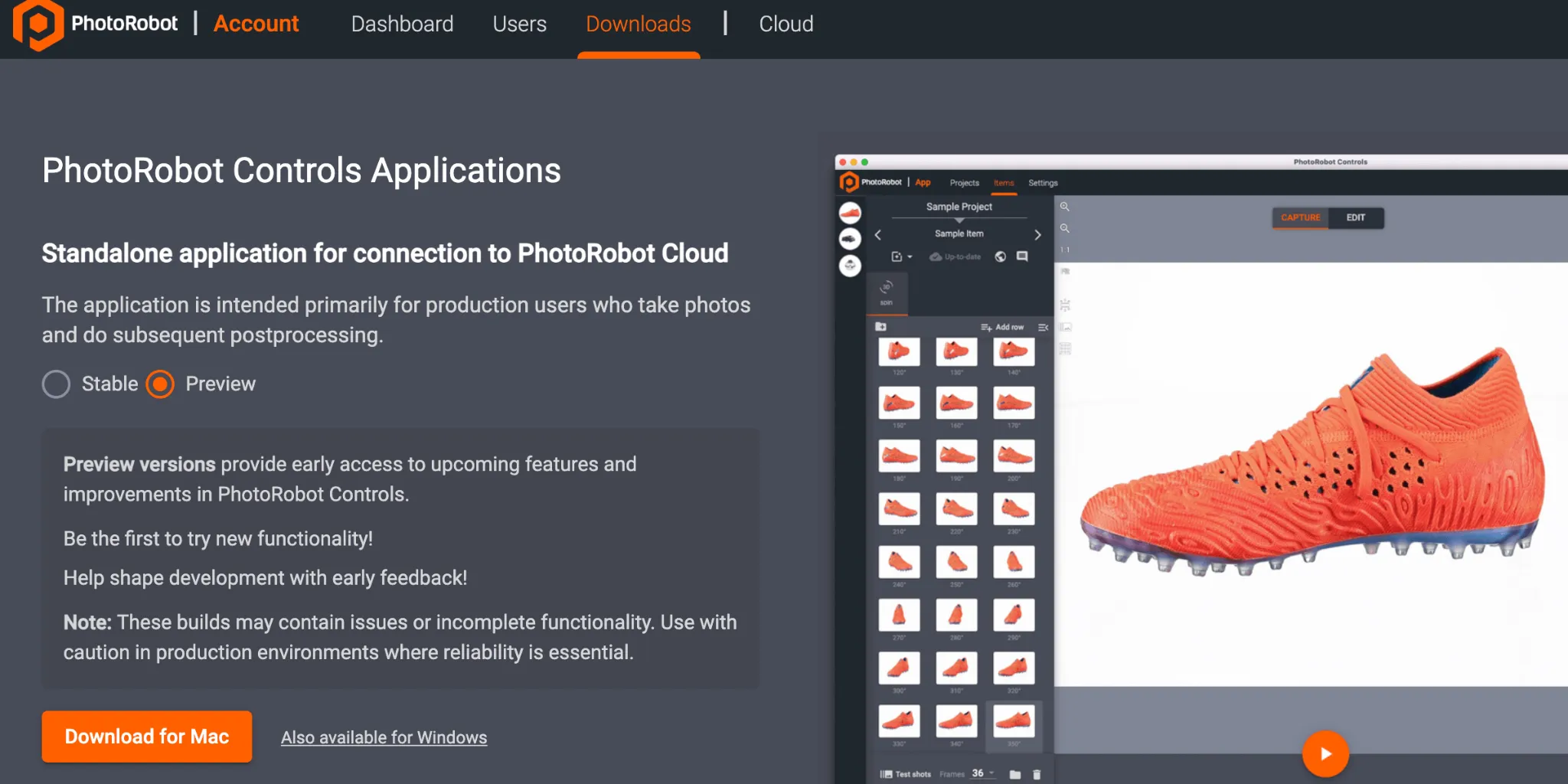
Muistiinpano: Sekä CAPP:n vakaa versio että esikatseluversio ovat ladattavissa ohjatun asennustoiminnon kautta. Vakaa versio sisältää CAPP:n uusimman version, ja se saa usein versiojulkaisuja. Samaan aikaan CAPP:n esikatseluversio tarjoaa varhaisen pääsyn uusimpiin ominaisuuksiin ja korjauksiin, jotka siirtyvät vakaaseen versioon muutamassa päivässä kehityksestä. Näin käyttäjät voivat testata esikatseluversiossa ilmeneviä ongelmia ennen yhteydenottoa tukeen, koska useimmat vakaan version raportoidut ongelmat on jo ratkaistu esikatseluversiossa. Huomaa kuitenkin, että esikatseluversiota ei suositella tuotantokäyttöön, jossa vakaus on kriittinen tekijä. Esikatseluversio on aktiivisessa kehityksessä, joka voi edelleen sisältää epätäydellisiä ominaisuuksia tai ratkaisemattomia virheitä.
Tärkeä: CAPP:n vanhempia versioita ei ole tarkoitettu asiakas- tai julkiseen jakeluun tietokannan vioittumisen riskin vuoksi. CAPP:n vanhemmat versiot ovat vain valtuutettujen PhotoRobot-teknikoiden käytettävissä sisäistä kehitystä tai erittäin erityisiä käyttötapauksia varten.
Löydät CAPP:n uusimman vakaan version ja esiversion osoitteesta CAPP:n uusimmat latausversiot.
Itseasennuksen tuki ja vianetsintä
Asennusprosessi alkaa lataamalla asennustiedosto.
Huomioi CAPP:n asennuksen vaatimukset:
- Käyttäjällä on oltava järjestelmänvalvojan oikeudet CAPP:ta asentavaan tietokoneeseen.
- Tietokoneen on täytettävä kaikki PhotoRobot-järjestelmä- ja laitteistovaatimukset.
- Tietokoneessa on oltava tuettu käyttöjärjestelmä, jossa on uusimmat päivitykset.
Tärkeä: Huomaa myös, että CAPP ei koostu vain robottiohjaustoiminnoista, vaan myös kameroiden, valojen ja muiden oheislaitteiden ohjaimista. Tämän seurauksena uusinta Mac OS -versiota ei usein tueta heti. Jos näin kuitenkin tapahtuu, se on vain väliaikaista ja kunnes kaikki asiaankuuluvat toimittajat julkaisevat yhteensopivat kirjastot.
Vaikka tämä saattaa olla hankalaa, se on paljon vähemmän hankalaa kuin yhteensopivuusongelmat CAPP:ta käytettäessä. Alentaminen on myös monimutkaisempaa kuin ennenaikaisen päivityksen välttäminen.
Kun käyttöjärjestelmä- ja järjestelmävaatimukset on täytetty, asennus etenee ohjatun asennustoiminnon kautta. Kirjaudu sisään PhotoRobot-tilille ja jatka sitten asennusta noudattamalla alla olevia ohjeita.
Asennus
Käyttäjän suostumuksen vahvistus
CAPP:ta ladattaessa uuden käyttäjätilin aktivointi edellyttää käyttäjän vahvistusta loppukäyttäjän lisenssisopimukselle (EULA) ja muille asiaan liittyville asiakirjoille.
Tilin aktivoinnin jälkeen on mahdollista tarkastella antamiasi suostumustietoja CAPP:n pilviversion kautta tiliprofiilin asetuksista.
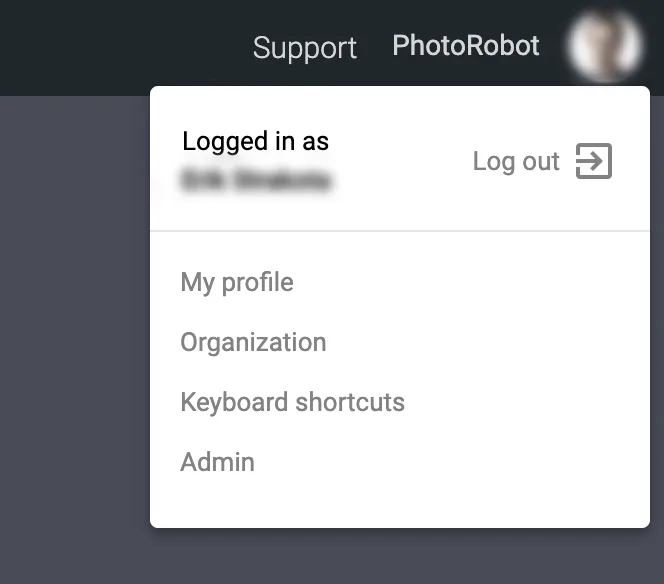
Voit tarkistaa suostumustietosi avaamalla CAPP:n pilviversion ja napsauttamalla käyttöliittymän oikeassa yläkulmassa olevaa käyttäjätilin kuvaketta. Valitse seuraavaksi valikkovaihtoehdoista Oma profiili .

Profiilivalikossa näkyy profiilikuva, yleiset käyttäjätiedot (nimi, puhelinnumero, yritys), salasana-asetukset ja suostumustiedot. Suostumustiedot sisältävät:
- Tietokoneen isäntänimi
- Sovittu päivämäärä
- PhotoRobot International -ohjelman lisenssisopimus
- Suostumus henkilötietojen käsittelyyn
- Tietoja henkilötietojen käsittelystä
Yhteensopivat kamerat
Tärkeä: Varmistaaksesi, että CAPP kommunikoi kameran kanssa oikein, sulje kaikki muut kameraan yhdistetyt ohjelmat. Muista myös käyttää yhteensopivaa kameraa PhotoRobot-yhteensopivien kameramallien luettelosta.
Huomautus: PhotoRobot Controls App 2.5.4 -julkaisusta lähtien mitä tahansa kameraa voidaan nyt tukea kolmannen osapuolen kameraintegraation kautta. Kuitenkin automatisoidussa valokuvauksessa uusimmat peilittömät Canon-kameramallit ovat luotettavimpia ja tehokkaimpia.
Vaikka on mahdollista käyttää PhotoRobotin ehdottamia kädessä pidettäviä kameroita Wi-Fi- tai kaapeliyhteyden kautta, se voi aiheuttaa ongelmia.
- Wi-Fi-yhteys saattaa katketa usein (pääasiassa aikakatkaisun vuoksi). Nämä edellyttävät aikaa vieviä uudelleenkytkentöjä järjestelmään.
- Jos käytät kädessä pidettävää kameraa kaapeliliitännän kautta, kaapelin pituudet ja liitännät ovat vaarallisia.
iPhone-yhteydessä PhotoRobot Touch -sovelluksen kautta on huomioitava, että näitä ongelmia ei esiinny. iPhone pystyy käsivaralta kuvaamiseen jatkuvalla valaistuksella. Jos kuitenkin salamakuvaus on tarpeen, yhteensopivat käsikamerat voivat toimia vaihtoehtona suositelluille peilittömille kameroille. Muista vain Wi-Fi- ja kaapeliyhteydellä varustettujen käsikameramallien mahdolliset ongelmat.
Yhteensopivat valot
Jotta CAPP voi kommunikoida valaistuksen kanssa, varmista, että käytät PhotoRobot-yhteensopivia studiovaloja. Näihin kuuluu kahdenlaisia valoja: FOMEI:n ja Broncolorin salamavalot sekä kaikki DMX-tuella varustetut LED-valot.
Etätuen asennus
Heti PhotoRobot Controls -ohjelmiston asennuksen jälkeen käyttäjän on suositeltavaa ladata ja asentaa Splashtop SOS (EU-alue) -sovellus. Splashtop SOS (EU) antaa PhotoRobot-teknikoille mahdollisuuden päästä asiakkaan tietokoneelle ja tarjota teknistä apua sen jälkeen, kun käyttäjä on antanut luvan tiettyyn tapaukseen.
Splashtop SOS:n lataaminen samanaikaisesti PhotoRobot Controls -ohjelman kanssa auttaa välttämään viivästyksiä etätukipyyntöjen käsittelyssä. Esimerkiksi, jos käyttäjällä ei ole riittäviä oikeuksia asentaa sovellusta. Splashtopin asennuksen jälkeen teknikkomme voivat välittömästi käyttää Splashtop Businessia päästäkseen tietokoneeseen, josta tekninen tukipyyntö on tehty.
Huomaa kuitenkin, että käyttäjän on ladattava EU-alueen versio Splashtop SOS -sovelluksesta. Yhdysvaltain alueen versio sovelluksesta ei anna teknikoidemme pääsyä tietokoneellesi.
Varmista siis, että käytät seuraavaa EU-alueen linkkiä Splashtop SOS:n lataamiseen:
Huomautus: Lisätietoja PhotoRobot-järjestelmien etätuen määrittämisestä on kohdassa PhotoRobot Remote Support Setup.
Työtilan luominen
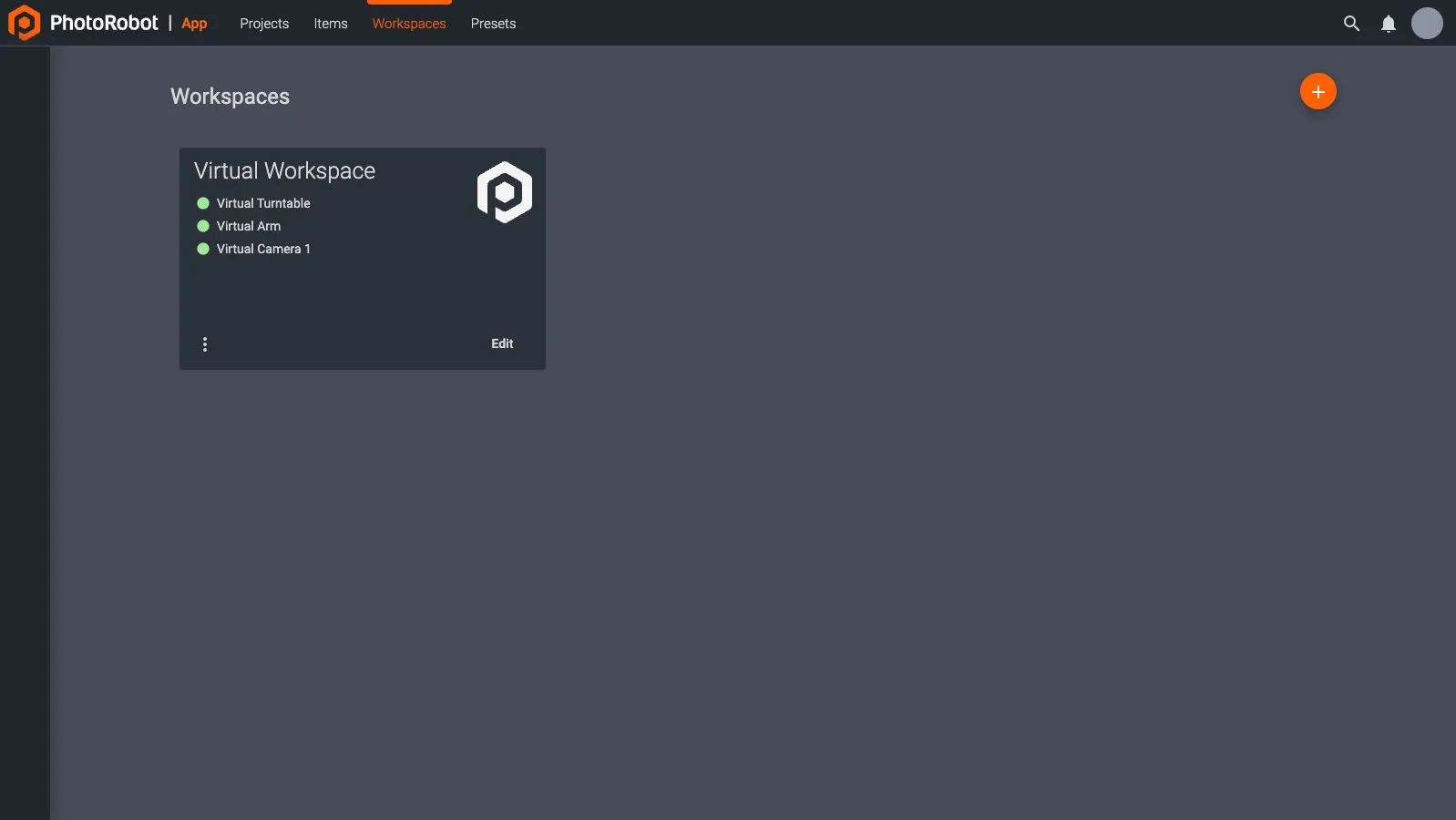
CAPP: n avaamisen jälkeen käyttäjä yleensä ensimmäinen asia, jonka käyttäjä tekee, on työtilan luominen. Työtila on luettelo laitteistoista, joita käytetään tietyssä valokuvauksessa. Se voi sisältää erilaisia PhotoRobot moduuleja, kameroita, valoja ja muita lisävarusteita.
Esittelyä varten käyttäjät voivat käyttää ennalta määritettyä mallityötilaa, joka on määritetty käyttämään virtuaalista laitteistoa. Tällä tavoin käyttäjät voivat silti kokeilla CAPP: n erilaisia ominaisuuksia valitsemalla virtuaalirobotteja ja kameroita.
Laitteiston liittäminen
Jos haluat aloittaa todellisen (toisin kuin virtuaalisen) laitteiston käytön, varmista ensin, että laitteisto on kytketty samaan tietokoneverkkoon (tai aliverkkoon) kuin tietokone, jota käytät PhotoRobot-laitteen ohjaamiseen.
Huomautus: PhotoRobot Controls -version 2.5.4 myötä mitä tahansa kameraa voidaan nyt tukea kolmannen osapuolen kameraintegraation kautta. Samaan aikaan yhteensopiviin kameroihin kuuluu valikoima Canon-kameramalleja, meidän suositellut Wi-Fi-yhteensopivat Canon-kamerat, ja myös iPhone-kamerat, jos käytetään PhotoRobot Touch App -sovellusta.
Tärkeää: Robottityöaseman automatisoituun valokuvaukseen PhotoRobotin suosittelemat peilittömät Canon Camera -mallit ovat luotettavimpia. Vaikka kädessä pidettäviä kameroita tuetaan Wi-Fi- tai kaapeliyhteydellä, niiden käyttö voi aiheuttaa ongelmia. Näitä ovat usein toistuvat Wi-Fi-yhteyden katkeamiset (pääasiassa aikakatkaisun vuoksi), kaapelipituuksien aiheuttamat komplikaatiot ja yhteysriskit.
Kameran kytkemiseksi sen on oltava yhteydessä samaan paikalliseen tietokoneverkkoon kuin robotti jollakin kolmesta tavasta:
- Suora yhteys USB: n kautta lähiverkkoon;
- Suositellun kädessä pidettävän kameran yhdistäminen erityisellä Wi-Fi-protokollalla (käytettävissä Canonin Tool-sovelluksessa Canonin kehittäjäsivulla)
- Yhden tai useamman iPhonen integrointi PhotoRobot Touch -sovelluksen kautta. (Katso ohjeet iPhonen käyttämisestä PhotoRobotin kanssa iPhone Touch -sovelluksen käyttöoppaasta.)
Kun olet liittänyt laitteiston (tai kameran) työtilaan, voit tarkistaa, onko se online-tilassa (CAPP tunnistaa sen). Tarkista tätä varten piste kyseisen laitteen nimen vasemmalla puolella. Jos laite tunnistetaan, siinä on vihreä piste.
Laitteen nimen vieressä oleva harmaa piste ilmaisee, että laitetta ei tunnistettu tai se ei ole päällä. Jos siinä on punainen piste, on virhe, kuten esimerkiksi käyttäjä ei ole vaihtanut kameraa manuaalitilaan. Virheen syyn selvittämiseksi vie hiiri punaisen pisteen päälle näyttääksesi työkaluvihjeen, jossa on kuvaus tapahtuvasta virheestä.
Täydelliset vaiheittaiset ohjeet laitteiston liittämiseen työtilan perustamiseksi löytyvät kohdasta PhotoRobot-työtilan perustaminen.
Jos kohtaat ongelmia, katso yleisiä ongelmia ja niiden ratkaisuja PhotoRobotin vianmäärityksestä.
Robotin käsivarren korkeuden asetus
Jos käytät robottikäsivartta työtilassa, huomaa, että lisäasetuksia todennäköisesti tarvitaan. Tämä johtuu siitä, että robottikäsi on itsenäinen kone, ja yksi sen ohjaamisesta CAPP: n kautta on, että korkeusliike kohdistaa pyörimisakselin valokuvattavan kohteen korkeuden keskipisteeseen.
Robottikäden pyörimisakselin korkeus määräytyy työpisteen konetyypin mukaan ja samalla säätöjalkojen säädöllä, joka kompensoi lattian epätasaisuudet. Jos kaikki on asetettu oikein, kone on vaakasuorassa ja kiertokeskus on tietyllä korkeudella lattian yläpuolella. Kokonaiskorkeus riippuu kuitenkin myös levysoittimen pinnan korkeudesta, joka vaihtelee eri robottien välillä. Tämä tarkoittaa, että korkeusviitteessä voi olla ristiriita, koska robottikäsivarren pylvään alla on korkeussovitin siten, että se kohdistuu karkeasti.
Täydellisen kohdistuksen varmistamiseksi on tarpeen syöttää varren ja levysoittimen välinen korkeusero CAPP: hen. Korkeusero mittaa tarkan etäisyyden robottikäsivarren pyörimisakselin ja levysoittimen pinnan korkeuden välillä (mukaan lukien sen päälle mahdollisesti asetetut lisälevyt). Tämä antaa tarkat mitat, joista järjestelmä laskee puolet kohteen korkeudesta, ja sijainnin, jossa käsivarren tulisi liikkua. Se varmistaa myös, että järjestelmä on asetettu toimimaan automaattisesti ja oikein.
Huomaa myös: Järjestelmä on määritetty hylkäämään arvot, jotka jäävät tietyn asetuksen kelvollisen alueen ulkopuolelle.
Aseta ROBOTIC ARM -hissi nollatasolle
Jotta voit asettaa Robot ARM -hissin nollatasolle, avaa ensin CAPP:n paikallinen versio ja siirry työtilan asetuksiin yhdellä kahdesta tavasta:
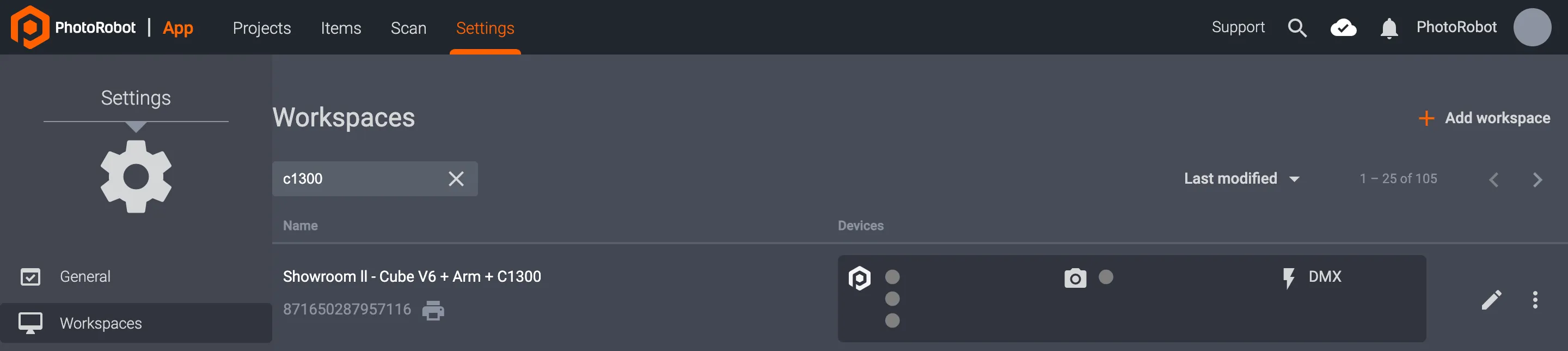
1. Avaa CAPP: n paikallinen versio, napsauta Asetukset käyttöliittymän yläosassa ja valitse vasemmanpuoleisista valikkovaihtoehdoista Työtilat . Etsi tästä valikosta toimiva työtila ja avaa Muokkaa työtilan asetuksia napsauttamalla työtilan otsikon vieressä olevaa muokkauskuvaketta:
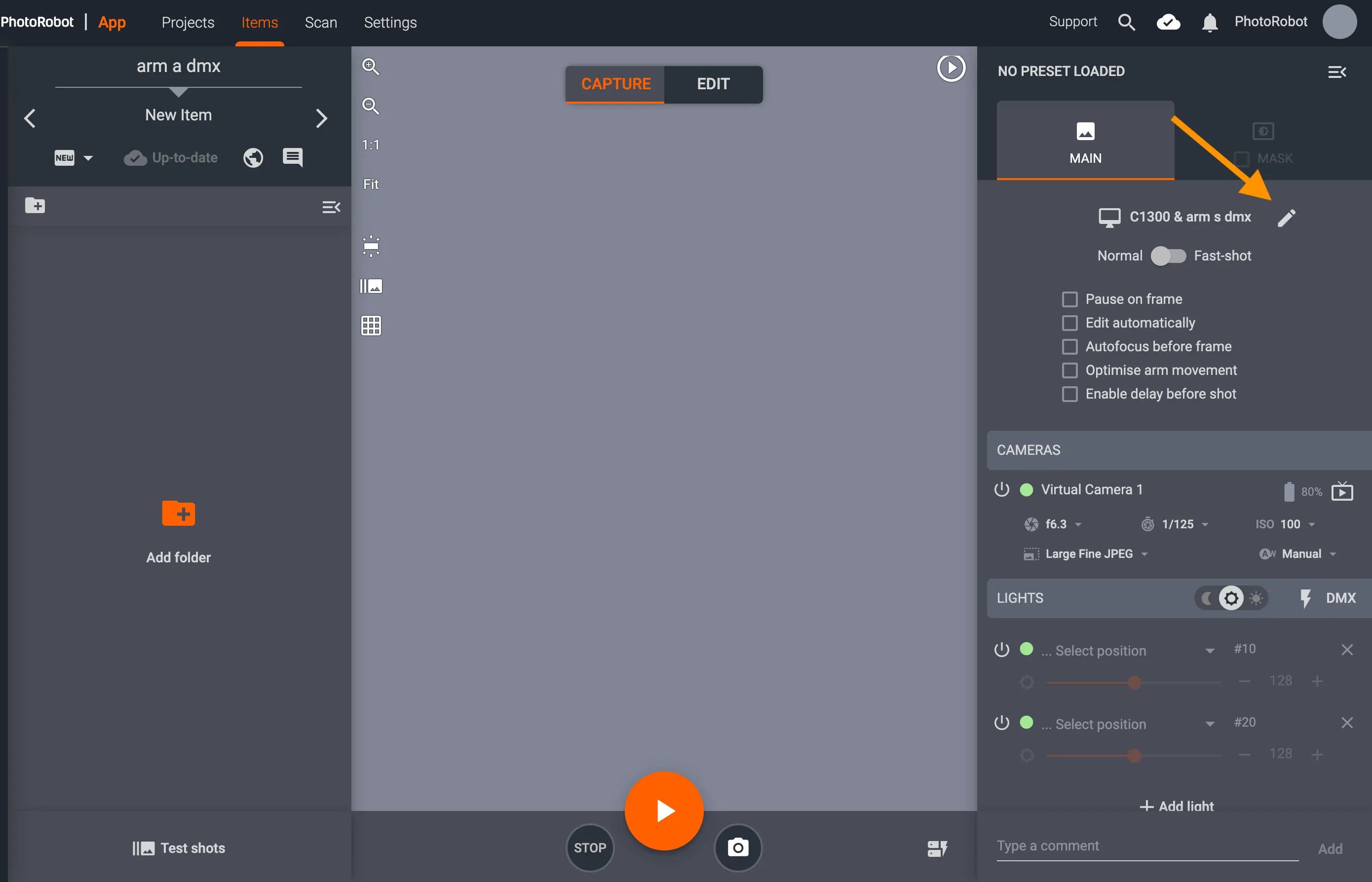
2. Vaihtoehtoisesti on mahdollista käyttää Muokkaa työtilaa valikko avaamalla kohde sieppaustilassa CAPP: n paikallisessa versiossa ja napsauttamalla sitten muokkauskuvaketta Työtilan otsikon vieressä käyttöliittymän oikealla puolella:
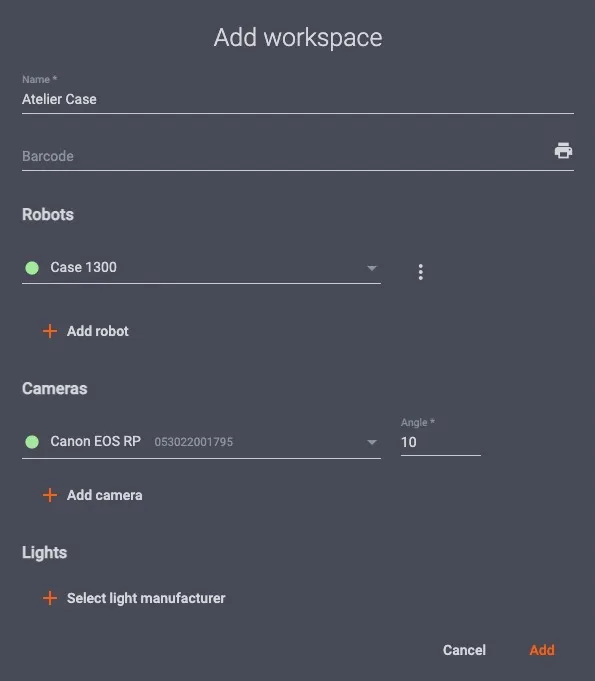
Kumpikin tapa avaa Muokkaa työtilan asetuksia -asetuksen. Määritä sitten robottikäsivarsi etsimällä laite Robotit-valikosta ja napsauttamalla 3 pystysuoraa pistettä Robot Arm -nimen vieressä.
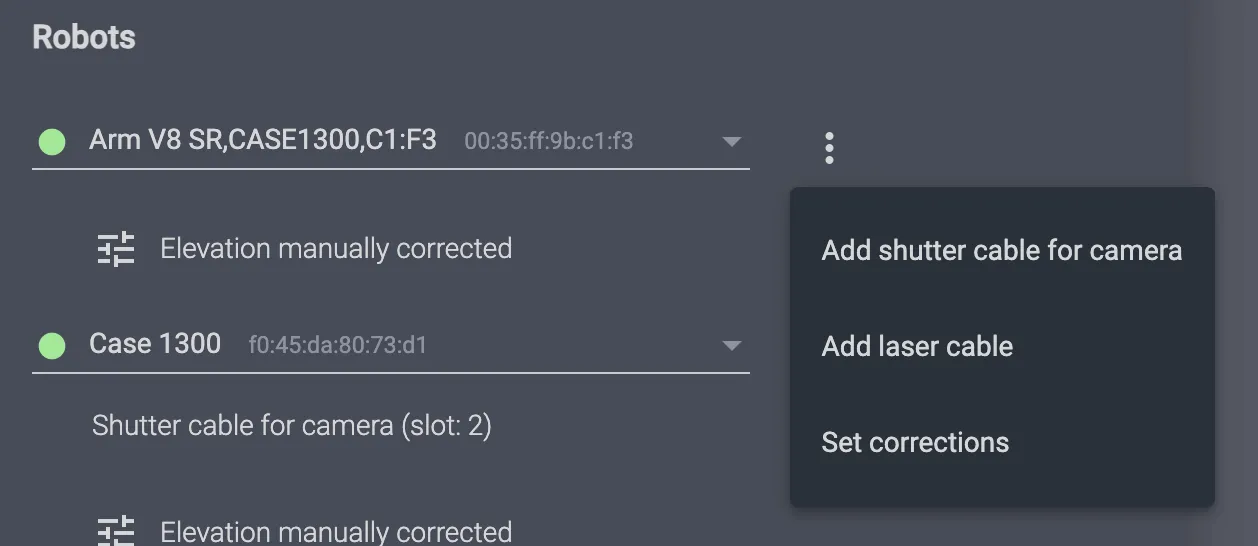
Valitse seuraavaksi valikkovaihtoehto Aseta korjaukset avataksesi Aseta hissin korjaustoiminto :
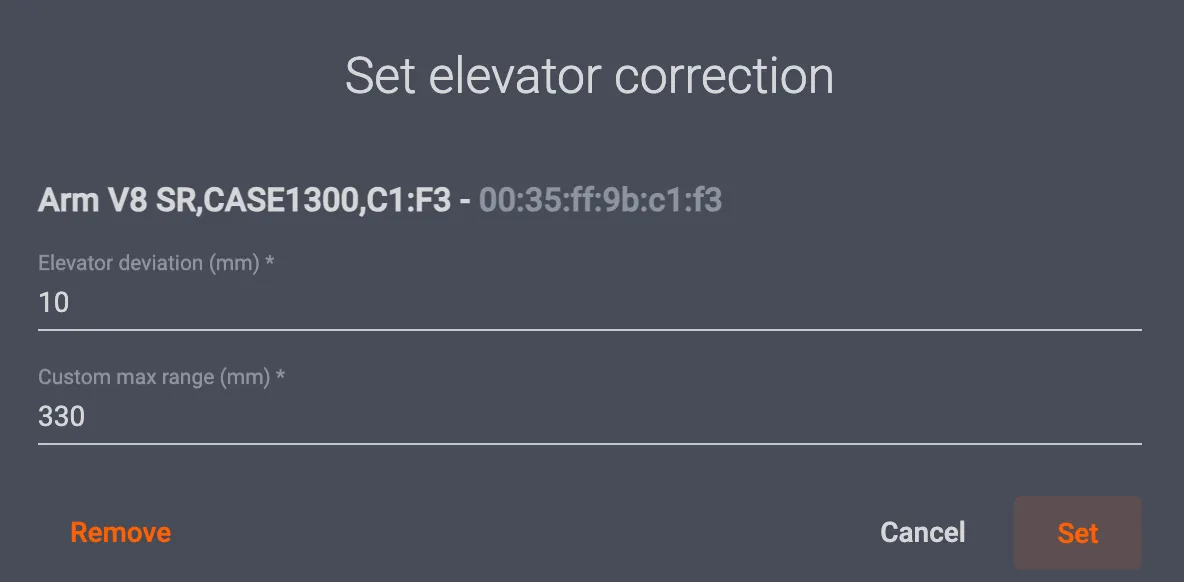
Aseta hissin korjaus -valikossa yläkentän numero Hissin poikkeama (mm) asettaaksesi kameran korkeuden sopivalle nollatasolle. Jos kamera on esimerkiksi 10 mm pöydän yläpuolella, keskitä kamera asettamalla Hissin poikkeama -10 mm:n arvoon.
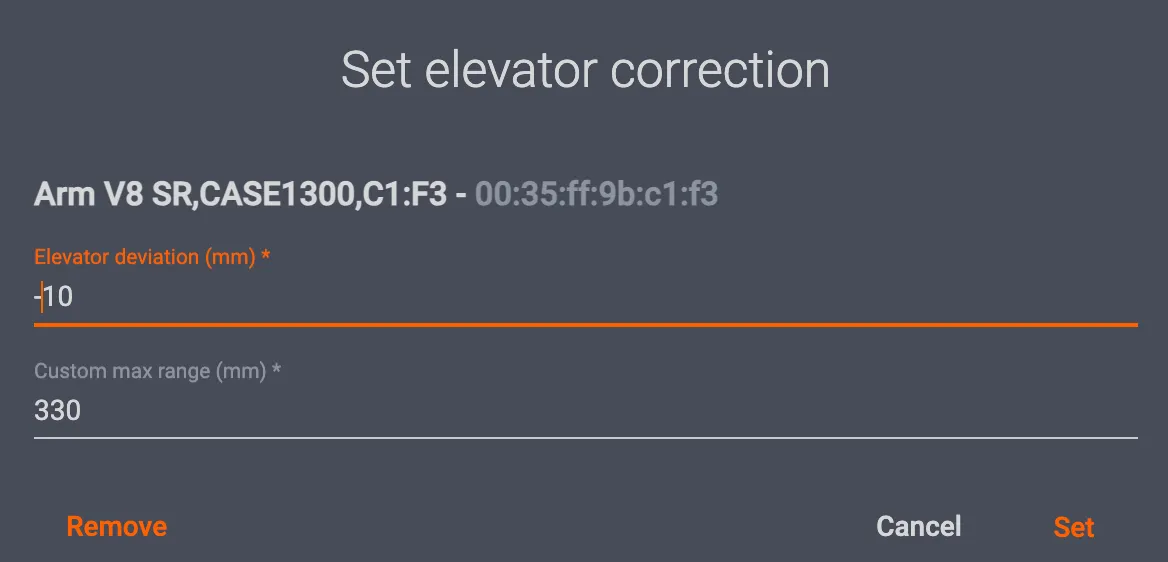
Jos kamera on 10 mm pöydän alapuolella, aseta Hissin poikkeama -asetukseksi +10 mm. Tämä kohdistaa robottikäsivarteen asennetun kameran korkeuden oikein ohjelmiston sopivalle nollatasolle.
Muistiinpano: Hissi voi olla enintään 330 mm. Näin ollen, jos nollatasoa säädetään +30 mm, suurin nosto voi nousta vain 300 mm: iin. Tämä tarkoittaa, että järjestelmä pystyy vastaanottamaan vain tuotteita, jotka ovat tällä marginaalilla pienempiä, 30 mm tai vähemmän.
Tiedostojen hallinta - projektit, kohteet ja kansiot
CAPP:ssä kuvat on järjestetty projekteihin, kohteisiin ja kansioihin.
- Projekti on ylimmän tason tietoentiteetti. Tyypillisesti projekti sisältää kohteita yhdestä valokuvauksesta tai ehkä yhdestä kuvauspäivästä / viikosta.
- Projektit koostuvat yhdestä tai useasta kohteesta. Yksittäinen kohde on yleensä tietty valokuvattu objekti.
- Kohde sisältää vähintään yhden kansion. CAPP: ssä sinulla voi olla useita kansioita yhdessä kohteessa, jotta erilaiset kuvat pysyvät erillään. Hyvin yleinen esimerkki on, että sinulla on yksi kansio 360° pyörivälle esitykselle (nimeltään "spin"), kun taas toinen käyttää toista still-kuvien tallentamiseen ("still-kuvat").
Kuvaamisen aloittamiseksi sinun on ensin lisättävä uusi projekti (ellei sinulla ole jo sellaista, jota haluat käyttää) sekä vähintään yksi kohde.
( ! ) - Jos sinulla on ongelmia, etsi lisätukea kameroiden, robottien, valojen liittämiseen ja muokkaamiseen PhotoRobot vianmääritysoppaasta.
Yleiset asetukset - Cloud Auto Backup, Processing, Touch App
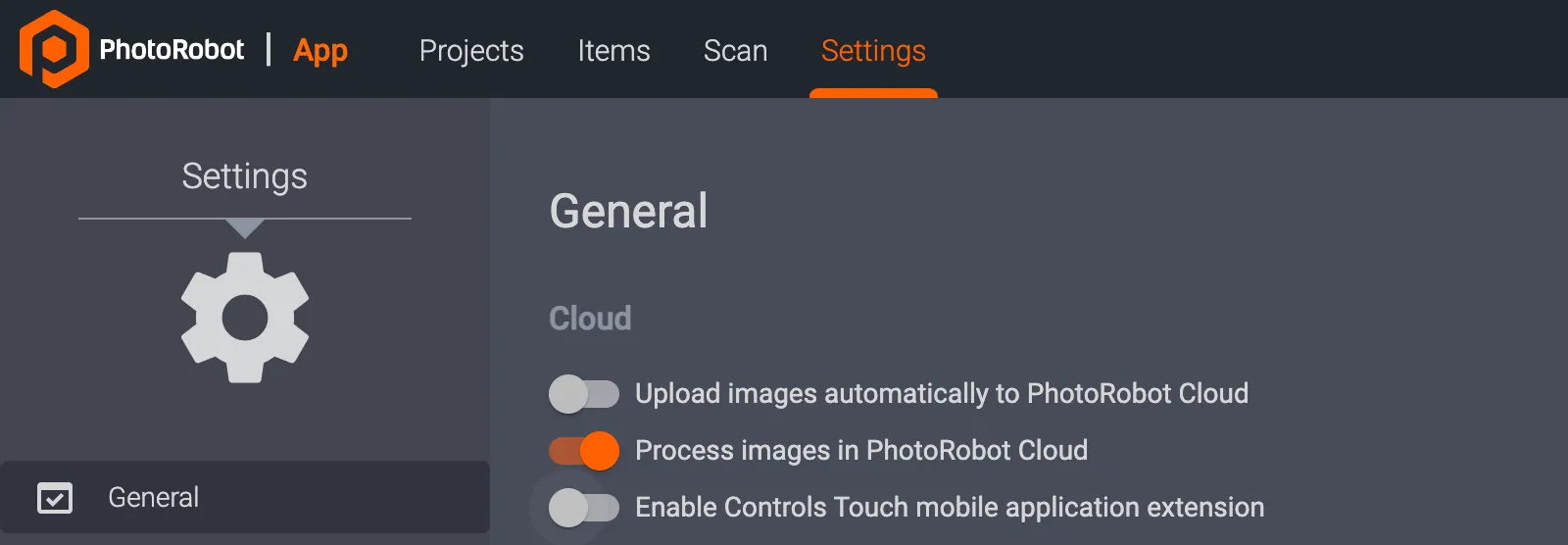
CAPP: n paikallisessa työpöytäversiossa on 3 yleistä asetusta, jotka voidaan ottaa käyttöön tai poistaa käytöstä:
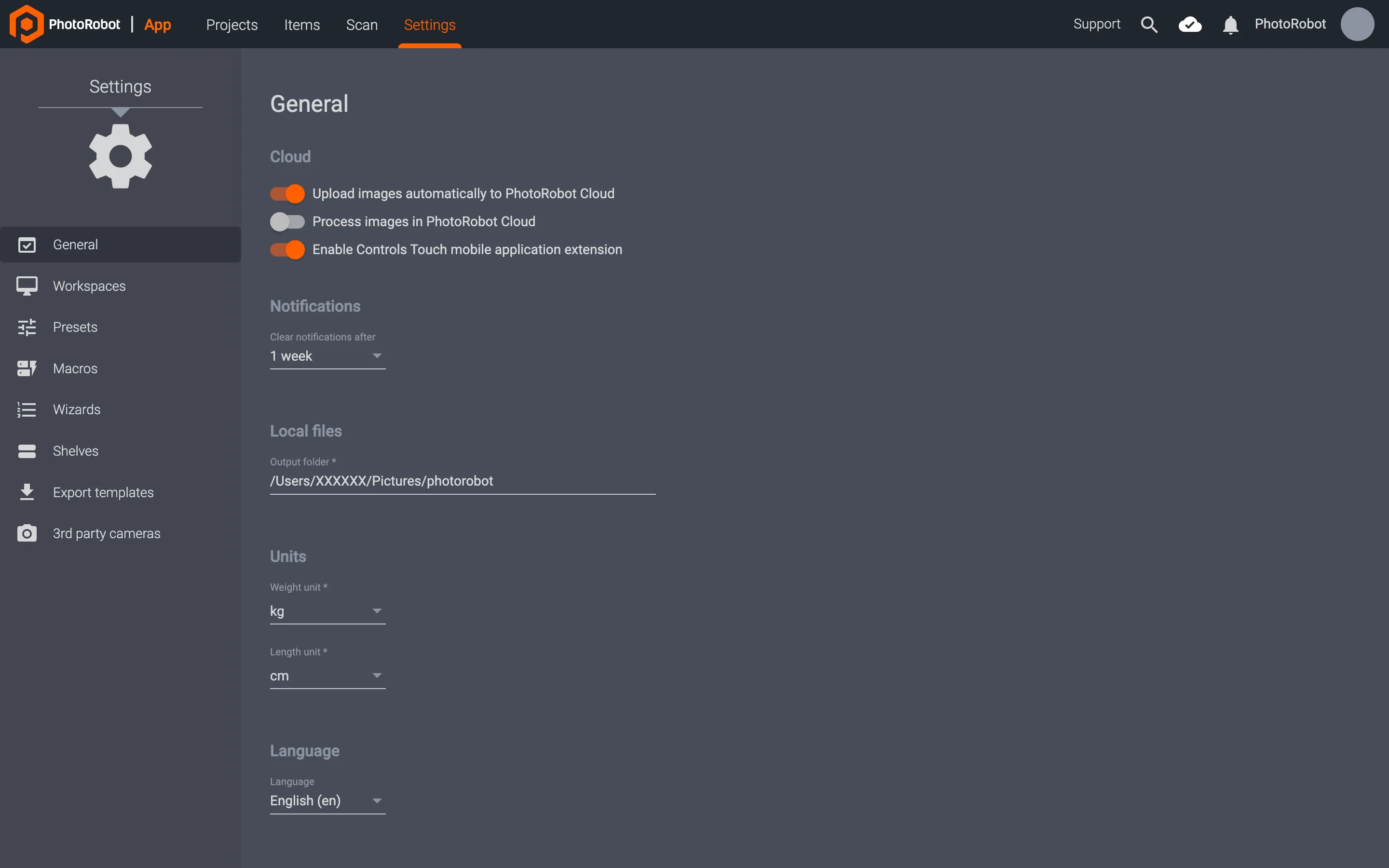
- Lataa kuvat automaattisesti PhotoRobot Cloudiin
- Kuvien käsitteleminen PhotoRobot Cloudissa
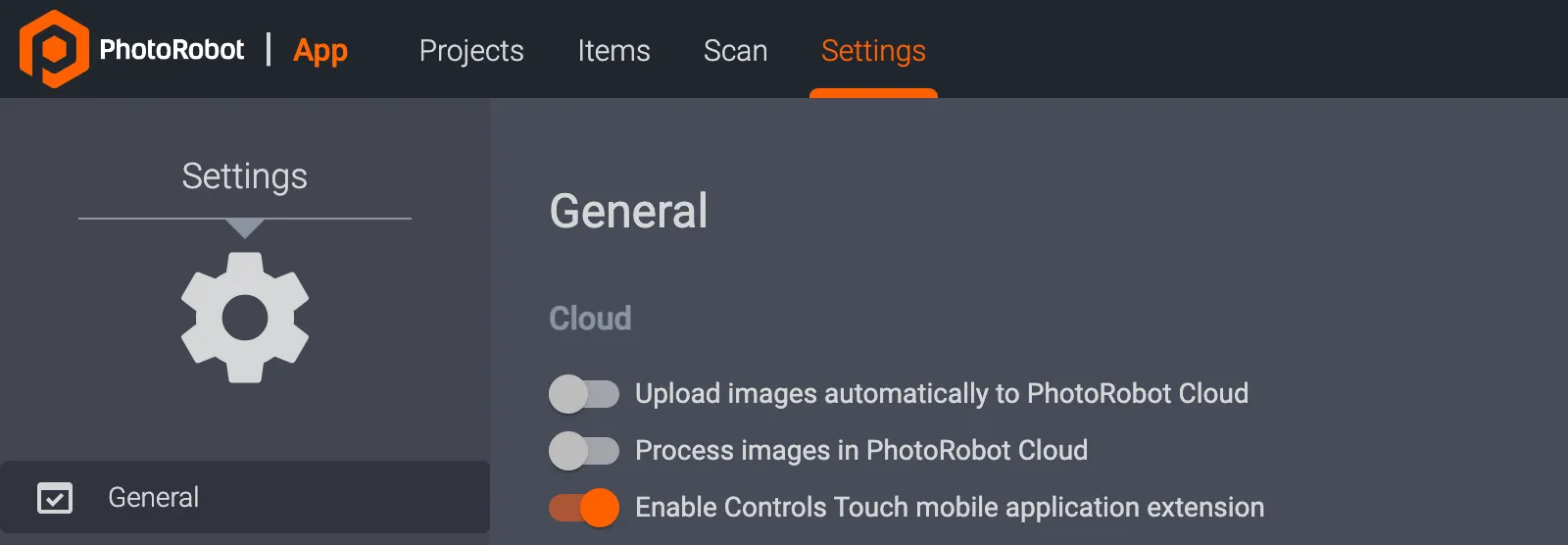
- Ota ohjaimet käyttöön kosketa mobiilisovelluksen laajennusta
Oletusarvoisesti paikalliseksi sovellukseksi asetetaan Lataa kuvat automaattisesti PhotoRobot Cloudiin. Tämä ominaisuus tallentaa automaattisesti varmuuskopion otetuista kuvista pilvipalvelimellesi myöhempää vientiä varten.
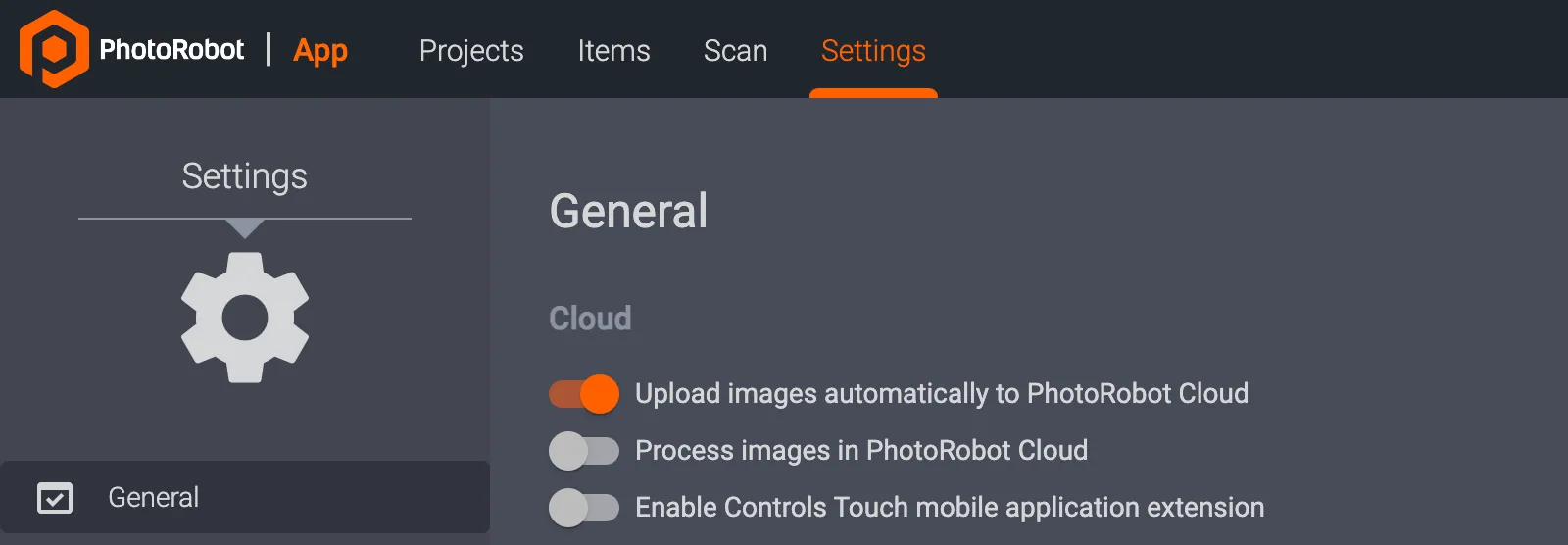
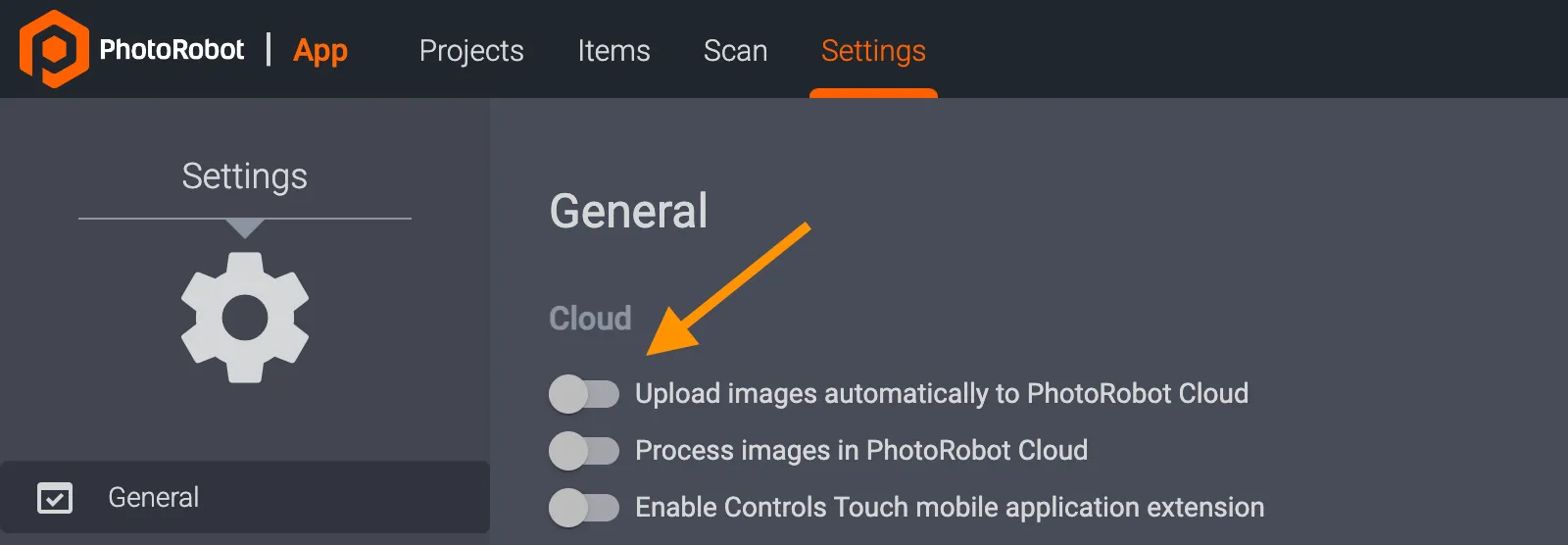
Jos haluat poistaa Lataa kuvat automaattisesti PhotoRobot Cloudiin -asetuksen käytöstä, kytke asetus pois päältä CAPP: n yleisten asetusten paikallisessa versiossa. Tämä tallentaa sen sijaan kaapatut kohteet paikalliseen sovellukseesi tai omalle pilvitilillesi.
Käytä kytkimiä myös ottaaksesi käyttöön tai poistaaksesi käytöstä Käsittele kuvat PhotoRobot Cloudissa -ominaisuuden. Kun tämä ominaisuus on käytössä, se jälkikäsittelee kuvat automaattisesti PhotoRobot Cloudin esiasetusten mukaisesti sieppauksen jälkeen.
Jos käytät iPhonen PhotoRobot Touch -mobiilisovellusta, ota käyttöön Ota ohjaimet käyttöön kosketa mobiilisovelluksen laajennusta.
Muistiinpano: PhotoRobot Touchin asennuksen ja käytön tekniset ohjeet ovat PhotoRobot iPhone Touch -sovelluksen käyttöoppaassa.
Yleiset asetukset - Luo uusi kohde automaattisesti
Lisäksi CAPP:n paikallisen työpöytäversion Yleisissä asetuksissa on viivakoodinlukijan asetukset, jotka mahdollistavat viivakoodinlukijan lisäasetusten määrittämisen. Ota automaattinen alkion luonti käyttöön tai poista käytöstä Luo uusi kohde automaattisesti järjestelmään -kohdan vasemmalla puolella olevalla valitsimella, kun tuntematon viivakoodi skannataan .
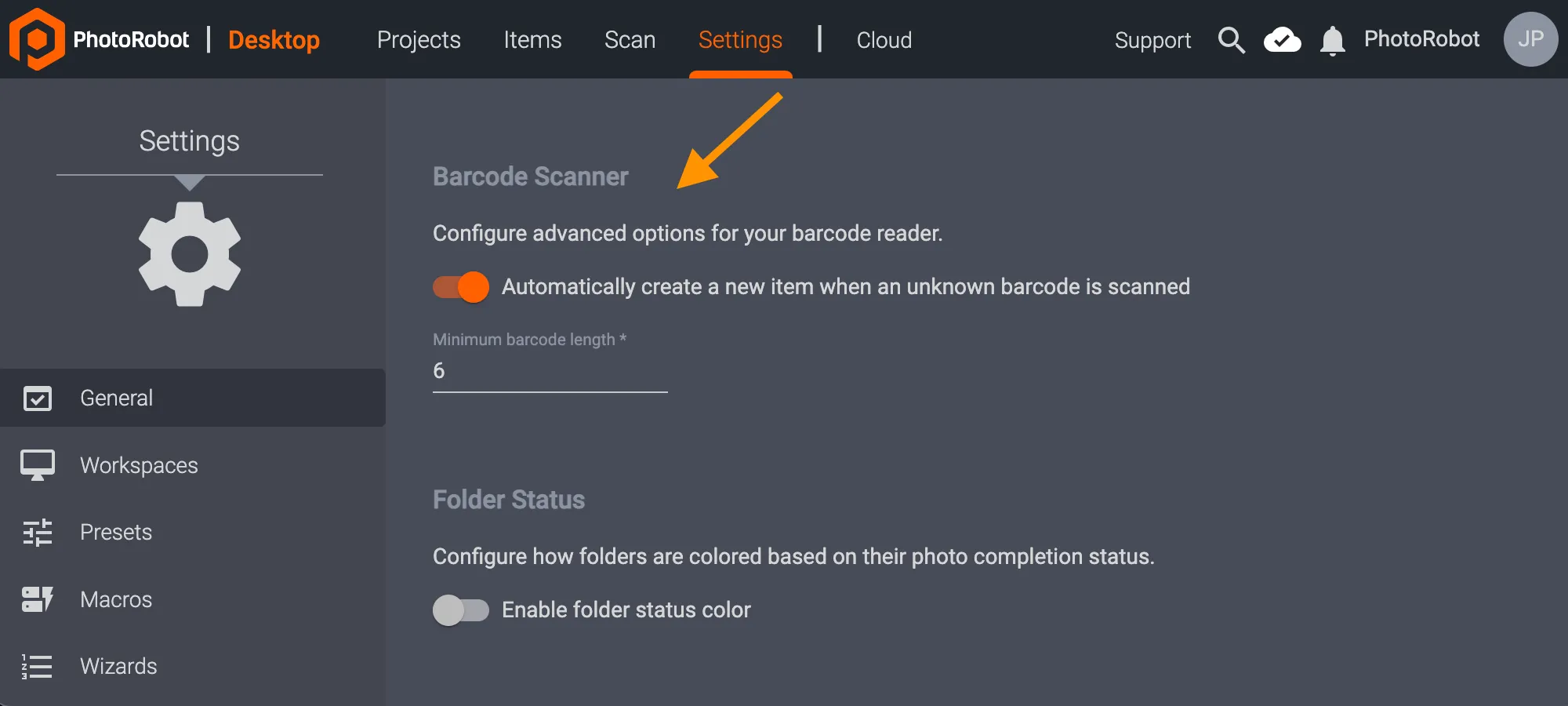
Kun asetus on aktiivinen, se toimii vaihtoehtona manuaaliselle kohteen luomiselle. Se mahdollistaa esineen tunnistamisen sieppauskohdassa (yleensä viivakoodin tai QR-koodin avulla). Operaattori yksinkertaisesti skannaa tuntemattoman koodin, ja projektiin luodaan automaattisesti uusi kohde. Nimikkeen nimeäminen tapahtuu skannatun merkkijonon ja nimikkeen tunnistekentän mukaan. Sitten käyttäjä valokuvaa esineen.
Tällä tavalla studio-ohjelmistossa ei tarvitse suorittaa varastoon liittyviä toimintoja. Riittää esimerkiksi, että skannaat uuden kohteen ja skannaat sen jälkeen valokuvan esiasetetun (hyllyn) koodin (esim. valkoisille, tummille tai värikkäille esineille). Järjestelmä toimittaa sitten automaattisesti ja välittömästi täydellisen valokuvasarjan, jälkikäsittelee ne kokonaan ja jakaa ne automaattisella nimeämisellä kohdejärjestelmään.
Lisäksi CAPP-versiosta 2.13.beta58 lähtien on nyt mahdollisuus määrittää viivakoodien vähimmäispituus. Aiemmin viivakoodin / QR-koodin vähimmäispituus oli 6 merkkiä (muun muassa skannatun merkkijonon kaksoistulkintojen välttämiseksi). Nyt viivakoodin vähimmäispituus -asetus on säädettävissä niin, että esimerkiksi nelimerkkiset tunnisteet toimivat ilman lisäsäätöjä.
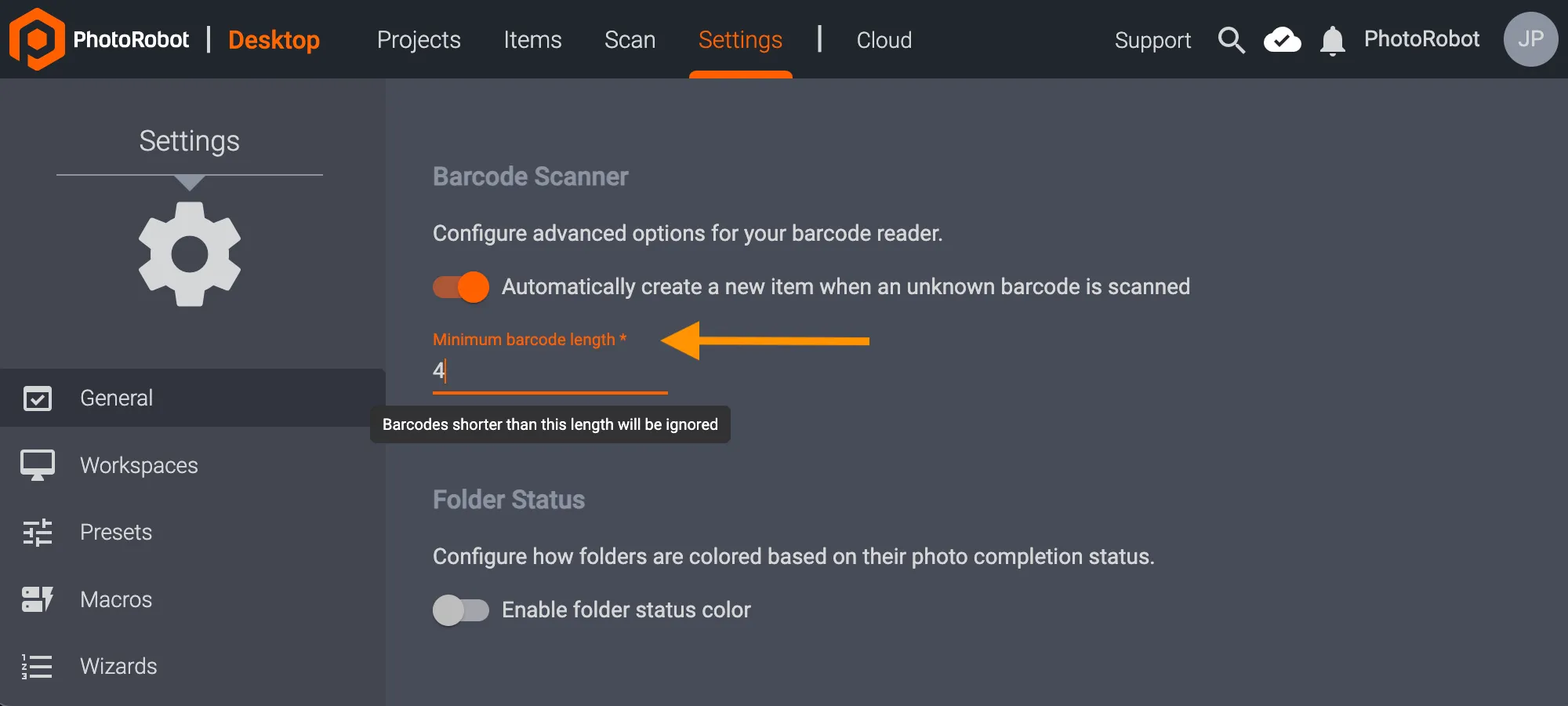
Jos haluat säätää viivakoodien / QR-koodien vähimmäispituutta, määritä viivakoodin vähimmäispituus myös CAPP:n paikallisessa versiossa kohdassa Yleisasetukset - Viivakoodinlukija. Järjestelmä ohittaa tällöin syötetyn pituuden lyhyemmät viivakoodit.
Muistiinpano: Kun nimikkeelle on määritetty viivakoodi järjestelmässä, viivakoodia voi käyttää myös suoraan Nimikkeen tietoalueen Capture-tilan käyttöliittymässä viivakoodipainikkeen kautta.
Projektitietojen ulkoisen käyttöoikeuden myöntäminen asiakkaalle
Työskennelläkseen asiakkaiden kanssa, jotka eivät kuulu maksullisen CAPP-tilin organisaatioon, tilin järjestelmänvalvoja voi luoda asiakastilejä maksutta. Asiakastilien avulla ulkoinen asiakas voi tarkastella projektitietoja, osallistua laadunvarmistukseen tarkistusten ja kommenttien avulla sekä käyttää projektin resursseja ladattavaksi. Tämä ominaisuus on tarkoitettu tilanteisiin, joissa valokuvastudio työskentelee ulkoisen asiakkaan kanssa, joka tarvitsee pääsyn tiettyihin töihin.
Jos haluat jakaa projektin organisaatiosi ulkopuolisen asiakkaan kanssa, varmista ensin, että kirjaudut CAPP:n pilviversioon käyttämällä käyttäjäprofiilia, jolla on järjestelmänvalvojan oikeudet.
1. Kirjaudu pilvipohjaiseen sovellukseen käyttämällä maksullista CAPP-tiliprofiilia järjestelmänvalvojan oikeuksilla ja napsauta käyttäjäprofiilin valikkokuvaketta kojelaudan oikeassa yläkulmassa. Napsauta sitten Organisaatio päästäksesi hallintapaneeliin.
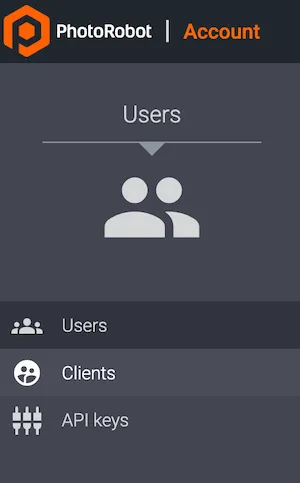
2. Napsauta seuraavaksi Organisaation hallintapaneelissa Käyttäjät käyttöliittymän yläreunassa olevista tilivaihtoehdoista.

3. Napsauta Asiakkaat luodaksesi uuden käyttäjävaihtoehdon, jolla voit käyttää Lisää asiakkaita -ominaisuutta tilin käyttöliittymästä. + Lisää asiakkaita -painike näkyy kojelaudan oikeassa yläkulmassa käyttäjäprofiilikuvakkeen alla.
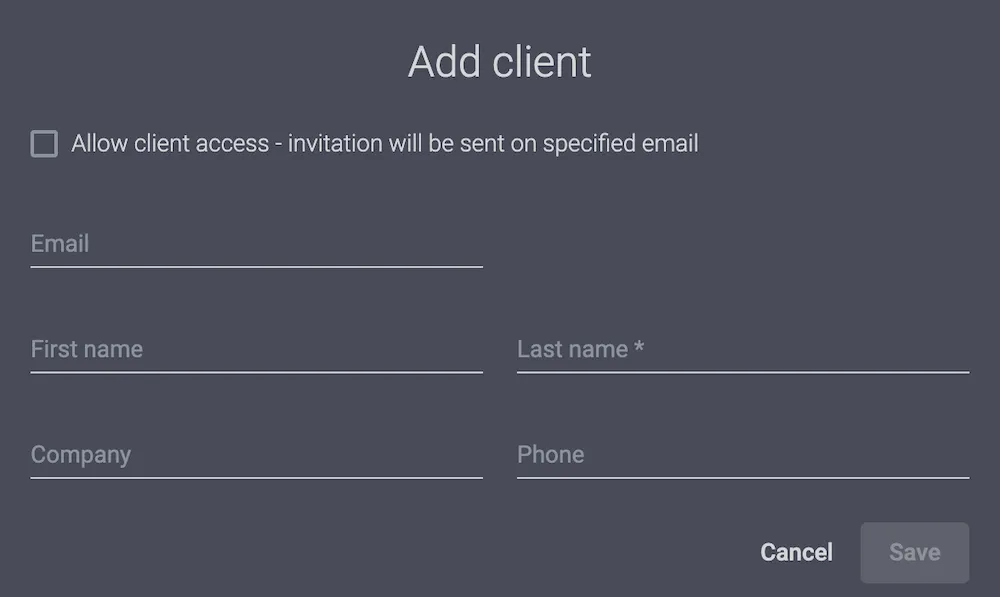
4. Napsauta + Lisää asiakas käyttäjäprofiilin kuvakkeen alla.
5. Täytä asiakkaan tietojen kentät (sähköpostiosoite, nimi, yritys, puhelinnumero) ja valitse ruutu Salli asiakkaan pääsy. Tarkista tietojen tarkkuus ja napsauta Tallenna lisätäksesi asiakkaan CAPP:iin.
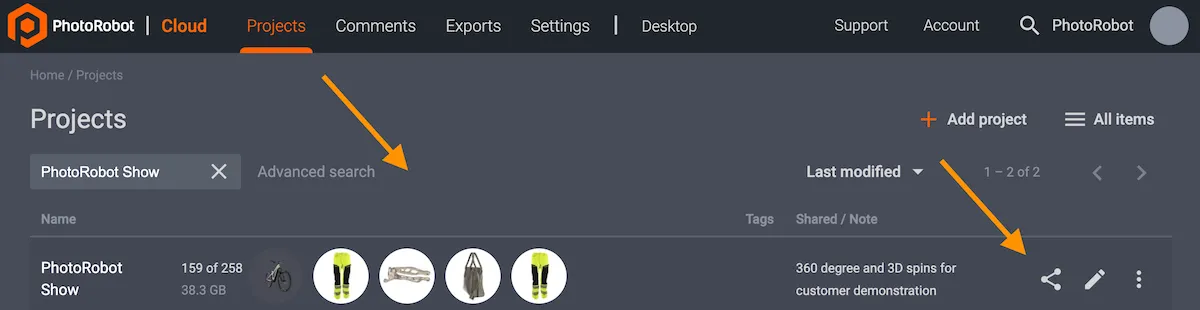
6. Avaa Projektit CAPP:n pilviversiossa, etsi projekti, jonka haluat jakaa tallennetun asiakkaan kanssa, vie hiiri projektipalkin päälle ja napsauta projektin tietojen oikealla puolella olevaa jakokuvaketta.
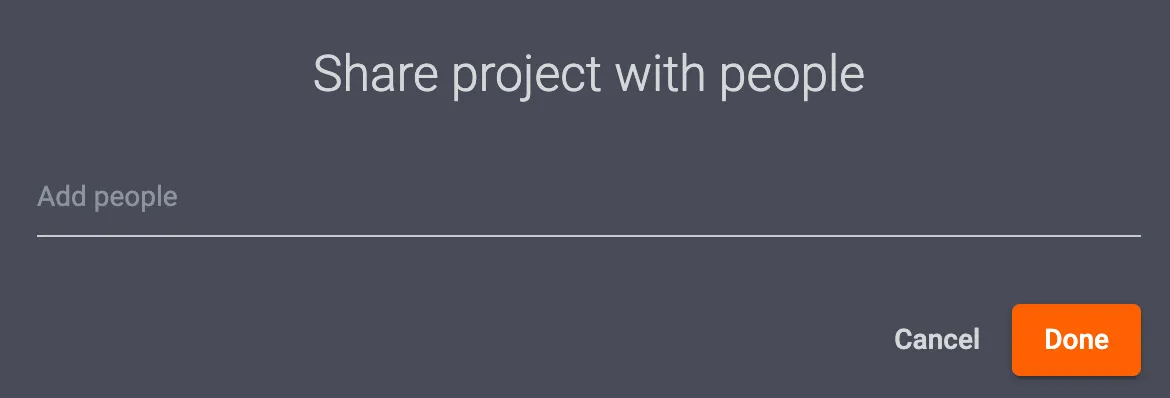
7. Napsauta projektipalkin oikealla puolella olevaa jakokuvaketta avataksesi Jaa projekti ihmisten kanssa ominaisuus, valitse tallennetut asiakkaat ja napsauta Valmis. Projekti jaetaan nyt asiakkaan kanssa, jolloin hän voi tarkastella työtä ja kommentoida CAPP:ssa laadunvarmistusta ja tarvittaessa lisäohjeita varten.
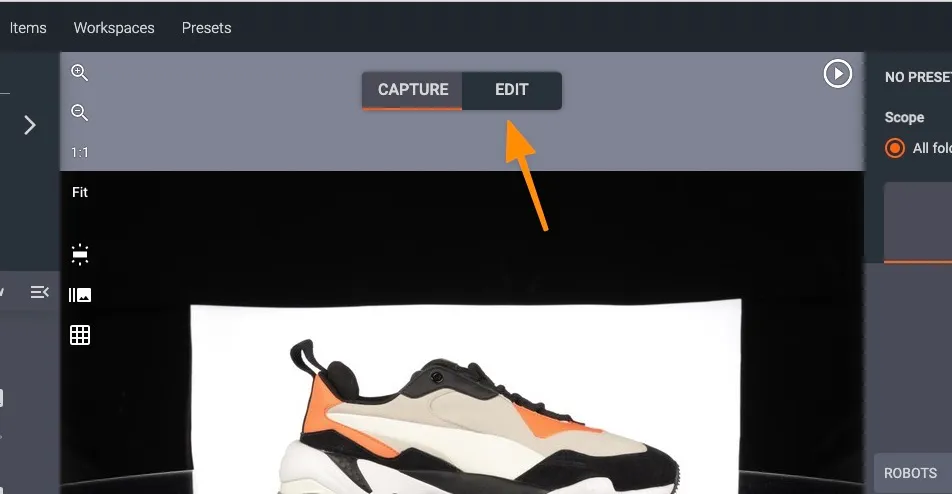
Sieppaustilan käyttöliittymä
Kun olet napsauttanut kohdetta, sinut viedään sieppaus- / muokkausliittymään. Käytettävissäsi olevat ohjausobjektit muuttuvat sen mukaan, onko sieppaustila aktiivinen vai muokkaustila . Sieppaustilaa käytetään valokuvausjärjestyksen ohjaamiseen, kun taas muokkaustila ohjaa kaikkea CAPP: ssä suoritettua jälkikäsittelyä. Aktiivinen tila korostetaan näytön yläosassa:
Kierrosten, still-kuvien tai videokansion lisääminen
Ennen valokuvausta sinun on luotava vähintään yksi kansio. Tärkeimmät kansiotyypit ovat spin (käytetään 360° esityksissä), still-kuvat (still-kuville) ja video (videoille).
Pyörityskansion luominen
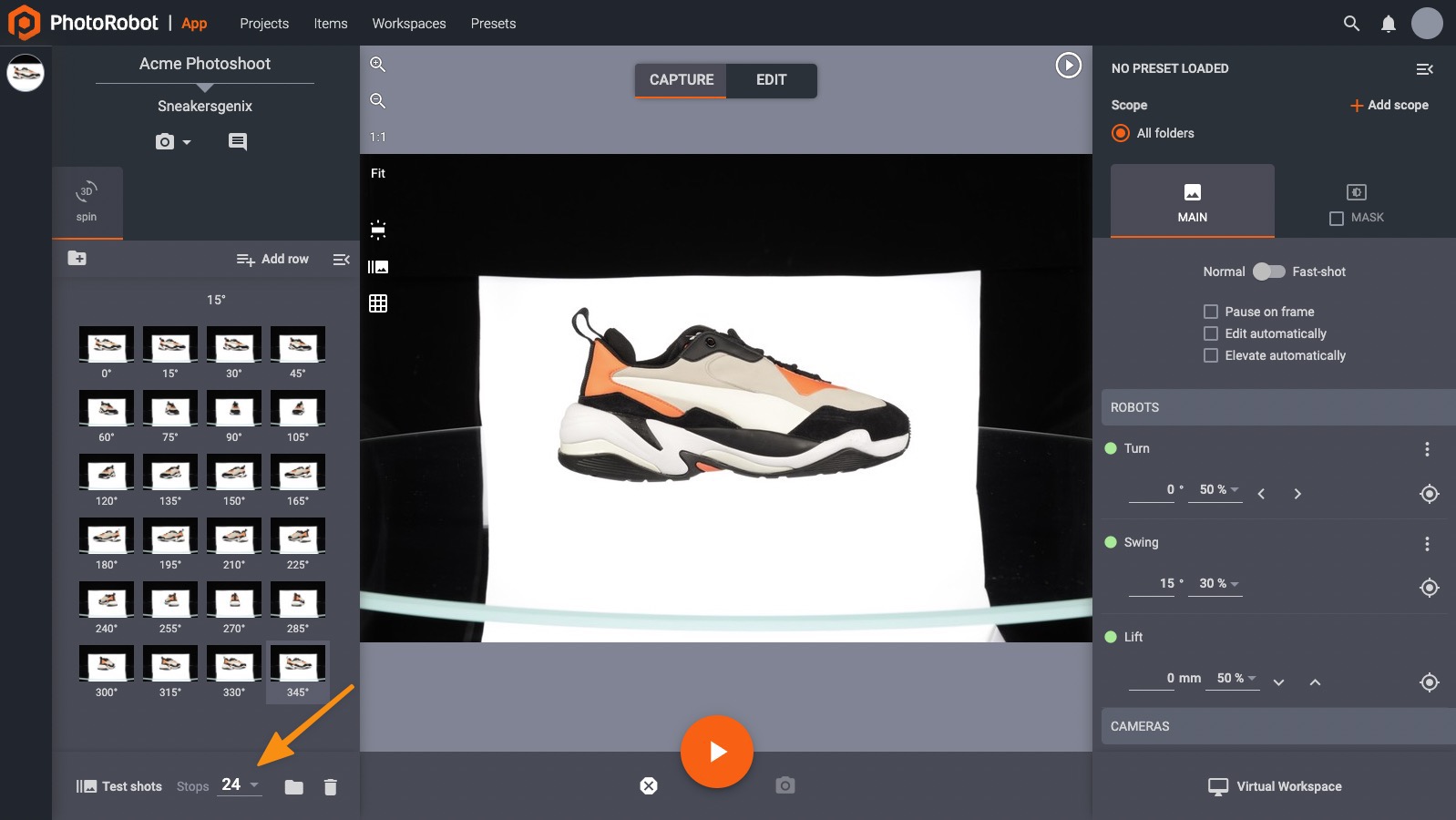
Kun lisäät spin-kansion, CAPP lisää automaattisesti pysäytyksiä (joita kutsutaan myös "kehyksiksi") sen perusteella, kuinka monta kuvaa per kierros valitset. Oletusnumero on 36, ja sitä voidaan muuttaa vasemmassa alakulmassa. Suuremmalla pysäytysmäärällä pyöriminen on tasaisempaa, mutta se vie myös enemmän säilytystilaa.
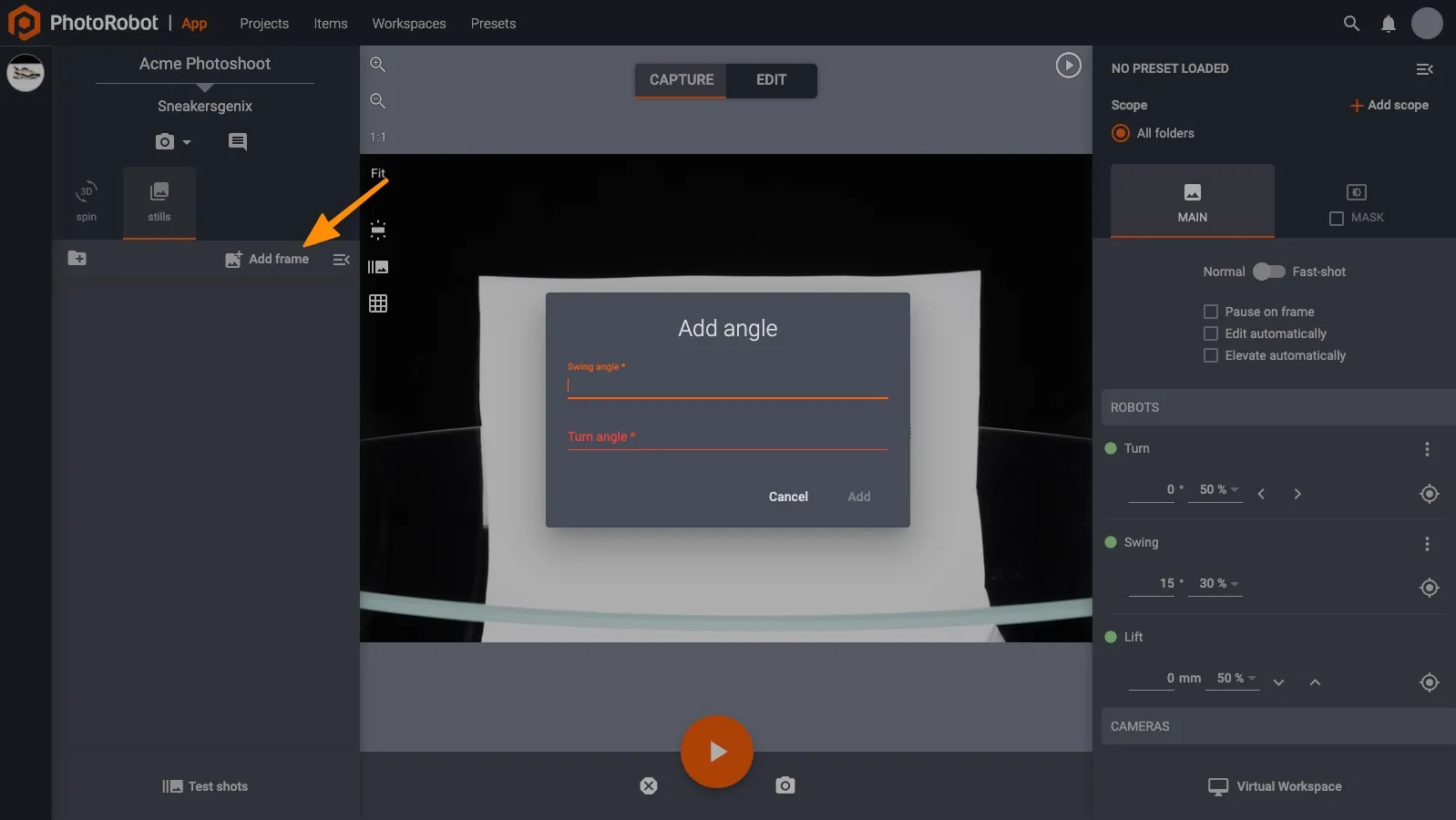
Stills-kansion luominen
Jos valitset still-kansion, sinun on lisättävä pysähdykset manuaalisesti. Tämä sisältää kääntökulman (pyörimiskulman) ja kääntökulman (kameran pystysuora sijainti pyöreää lentorataa pitkin). Kääntökulma on tärkeä, jos käytät robottivarttamme tai muuta moduulia, joka voi muuttaa kameran vaaka-asentoa.
Tuo kuvia
Joissakin tapauksissa saatat haluta tuoda kuvia uuteen tai olemassa olevaan kansioon CAPP:ssa. Otetaan esimerkiksi kädessä pidettävien valokuvien, yksityiskohtaisten kuvien tai muiden sekalaisten kuvien tuominen.
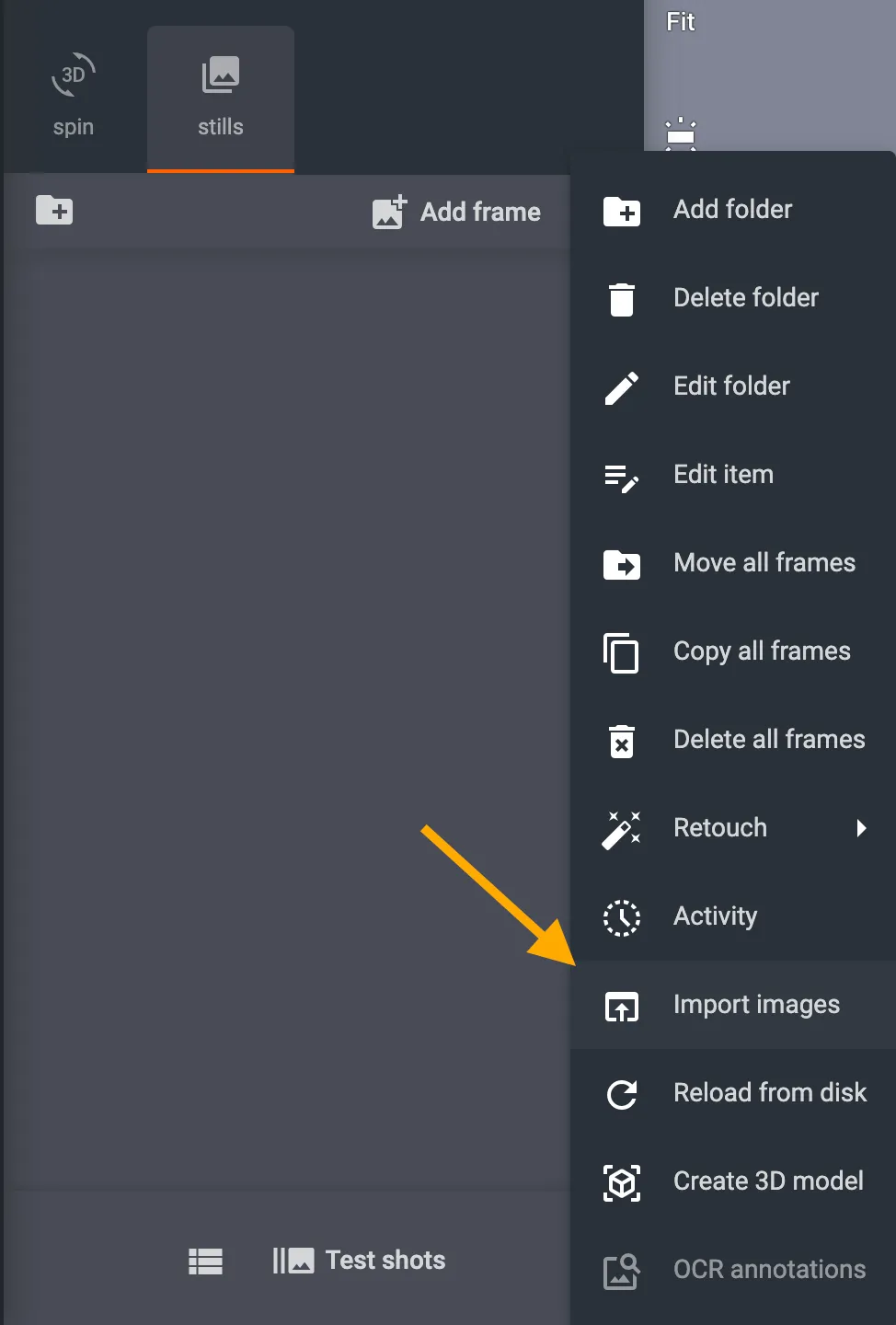
Jos haluat tuoda kuvia CAPP:iin, avaa ensin uusi tai olemassa oleva kohde CAPP:n Capture mode -käyttöliittymässä. Napsauta seuraavaksi kansioiden käyttöliittymän oikeassa yläkulmassa olevan kansion toimintovalikon kuvaketta.
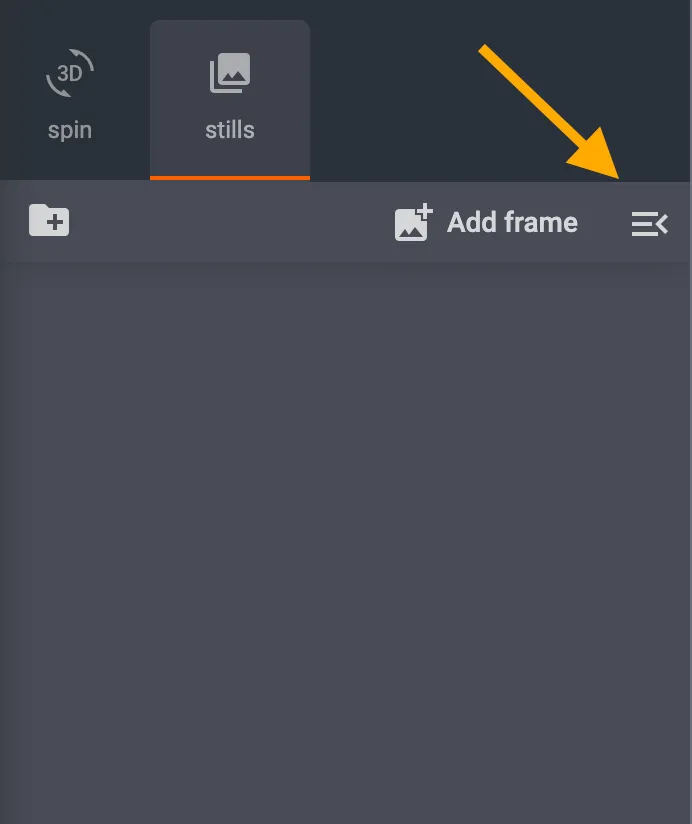
Etsi sitten kansion toimintovalikon vaihtoehdoista ja napsauta Tuo kuvia luettelosta.
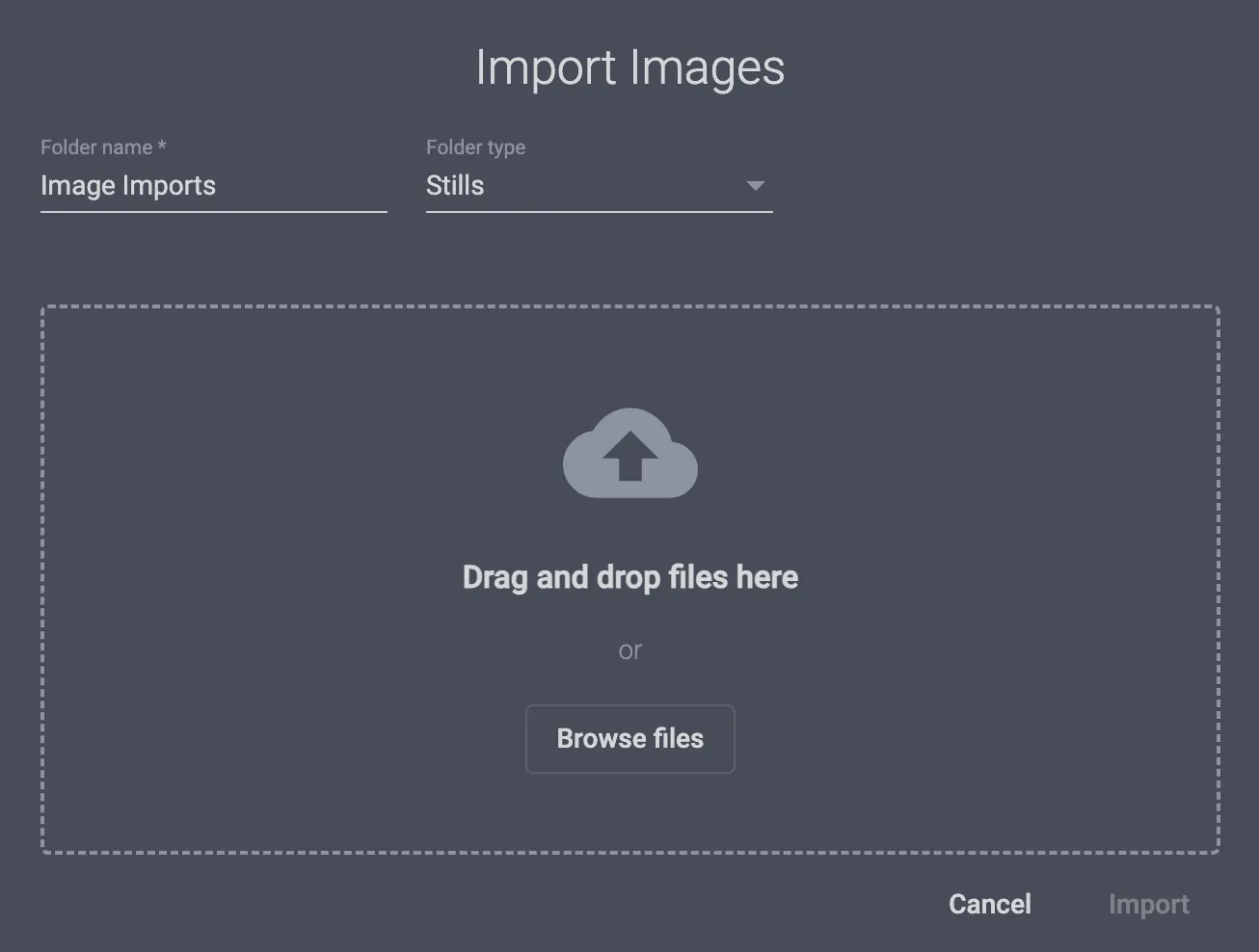
Tuo kuvat -painikkeen napsauttaminen avaa ponnahdusikkunan, joka mahdollistaa kuvien tuonnin vetämällä ja pudottamalla tai selaamalla paikallisia tiedostoja. Ikkunan yläreunassa on myös mahdollista määrittää kansion nimi ja kansiotyyppi tuoduille kuville.
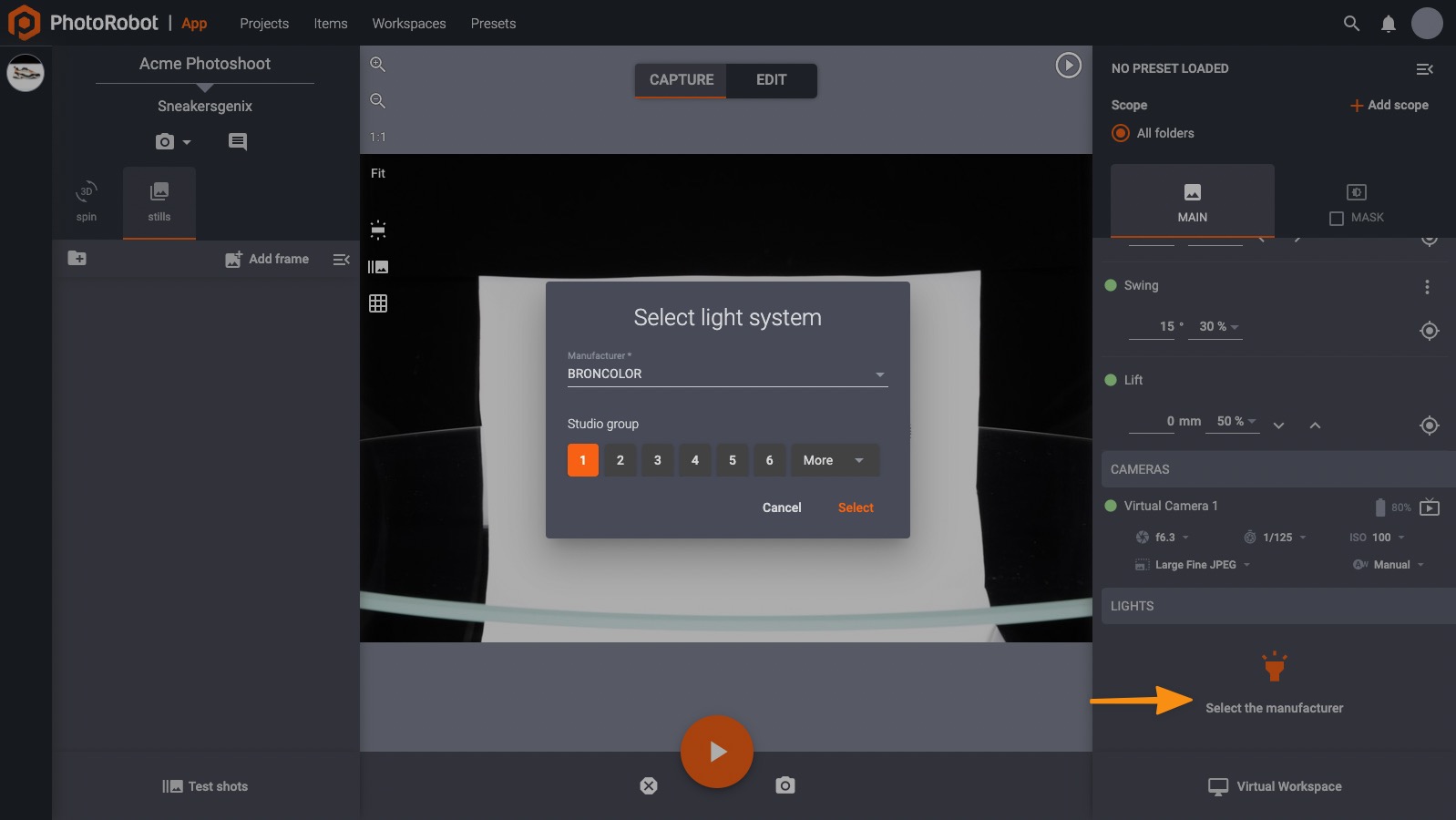
Ohjaa yhteensopivia valoja
Kun käytät CAPP:n kanssa yhteensopivia valoja, voit valita valot muokkaustilaikkunan oikeassa alakulmassa.
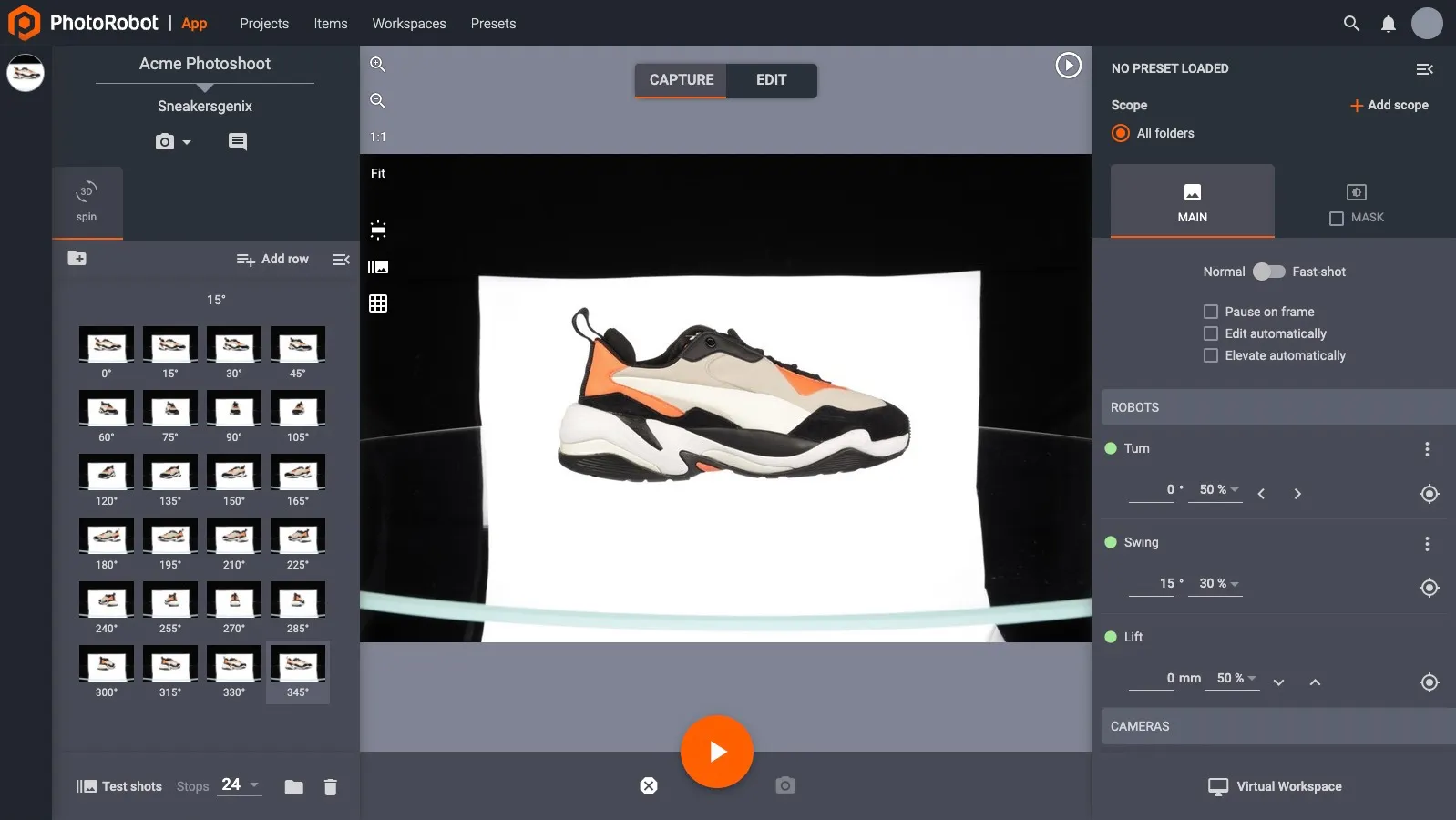
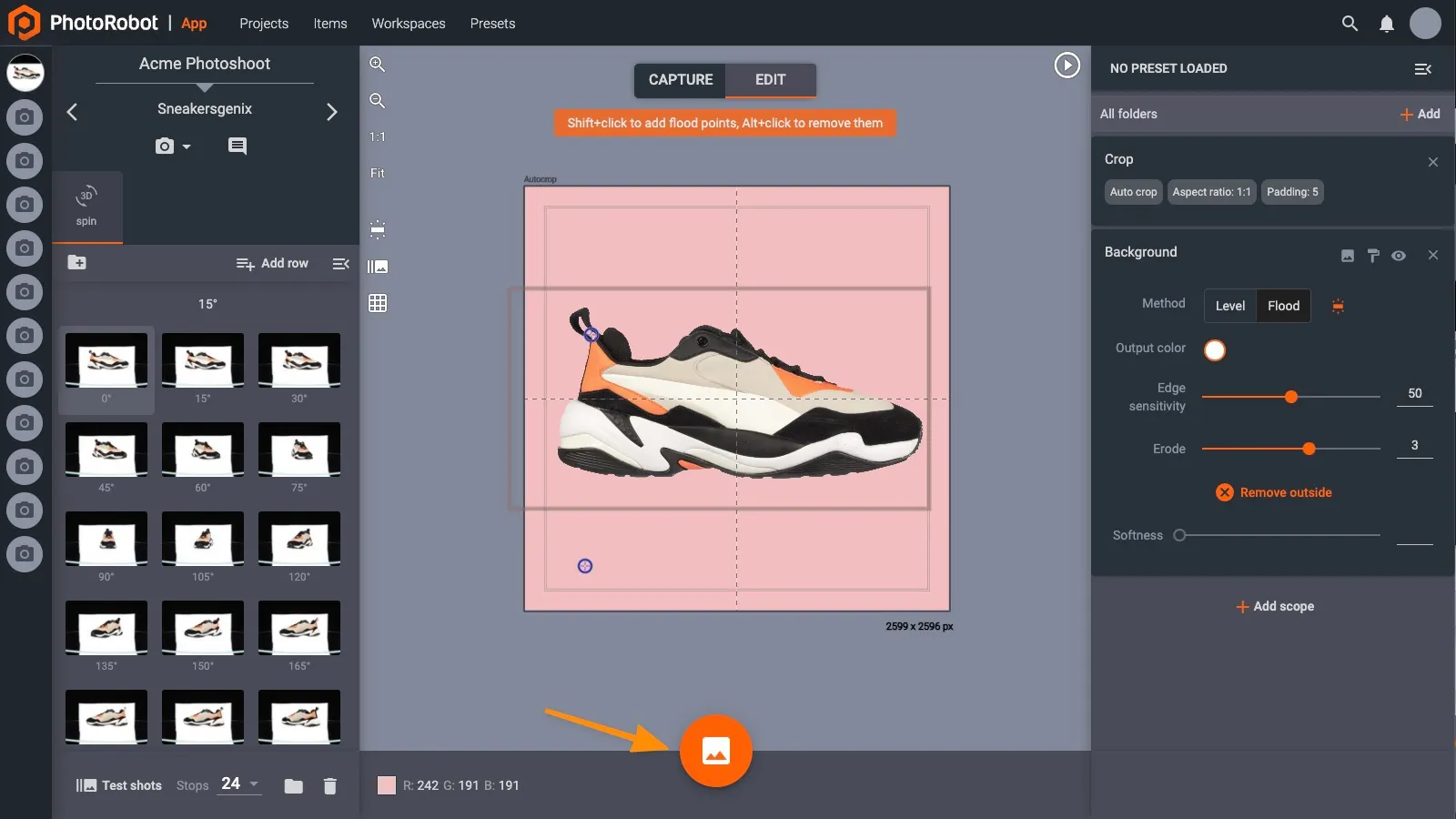
Capture Mode -käyttöliittymän yleiskatsaus
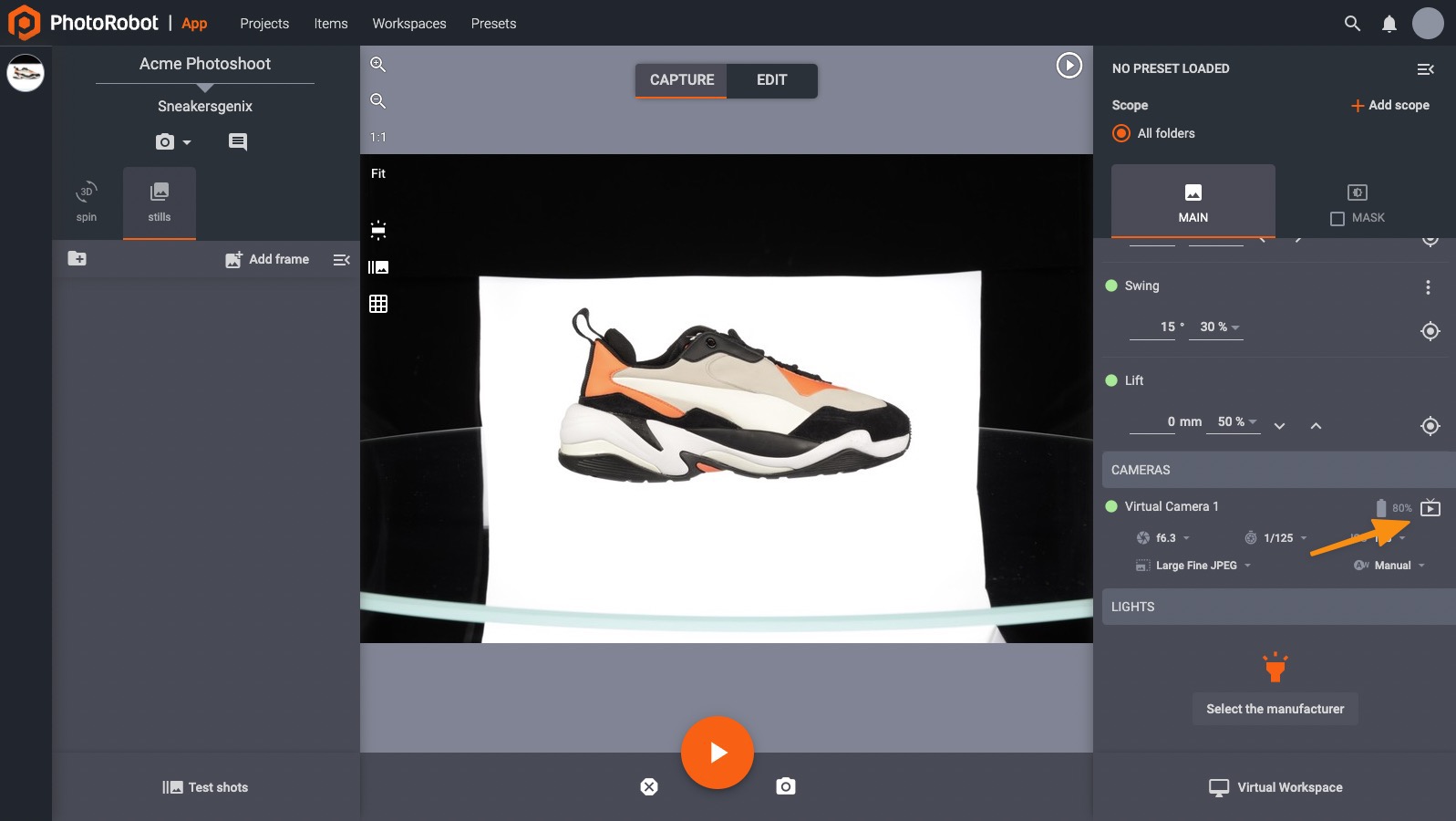
Sieppaustilan käyttöliittymän keskiosa sisältää esikatseluikkunan, joka näyttää joko valitun kuvan (jos olet jo ottanut jonkin verran) tai kamerasta suoratoistetun live-näkymän.
Reaaliaikanäkymä, joka on hyödyllinen, jos haluat tarkistaa maltin ja tarkennuksen, voidaan vaihtaa kameran ohjausalueella ohjauspalkin keskiosassa näytön oikealla puolella.
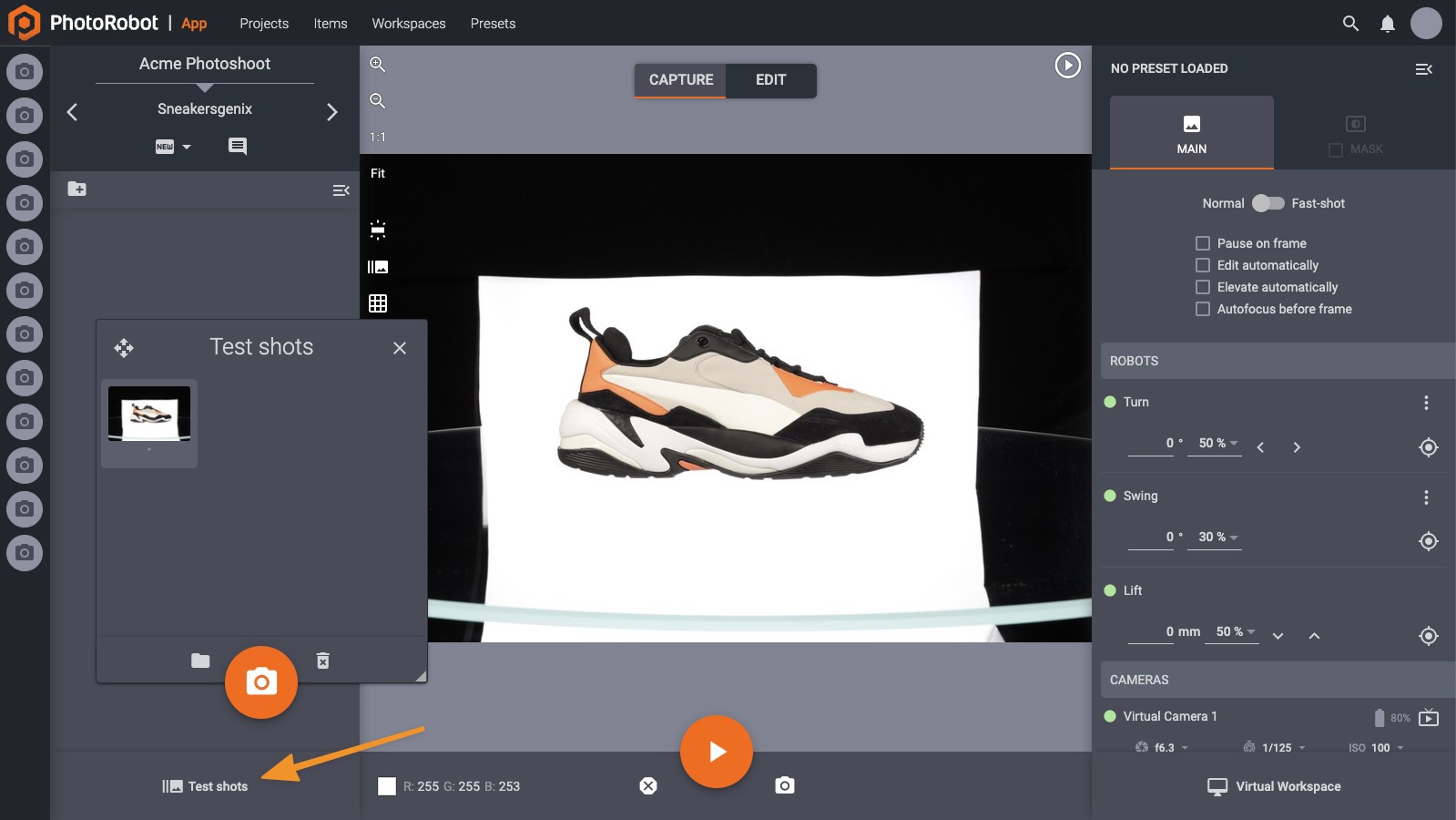
Testikuvien ottaminen
Ennen lopullisten kuvien ottamista on hyvä idea ottaa yksi tai useampi testikuva. Helpoin tapa tehdä tämä on painaa tietokoneen näppäimistön T-näppäintä . Tämä auttaa sinua tarkistamaan, pitäisikö sinun muuttaa valojen, kameran jne. Testikuvat tallennetaan "test shot" -kansioon, jota voit käyttää näytön vasemmassa alakulmassa.
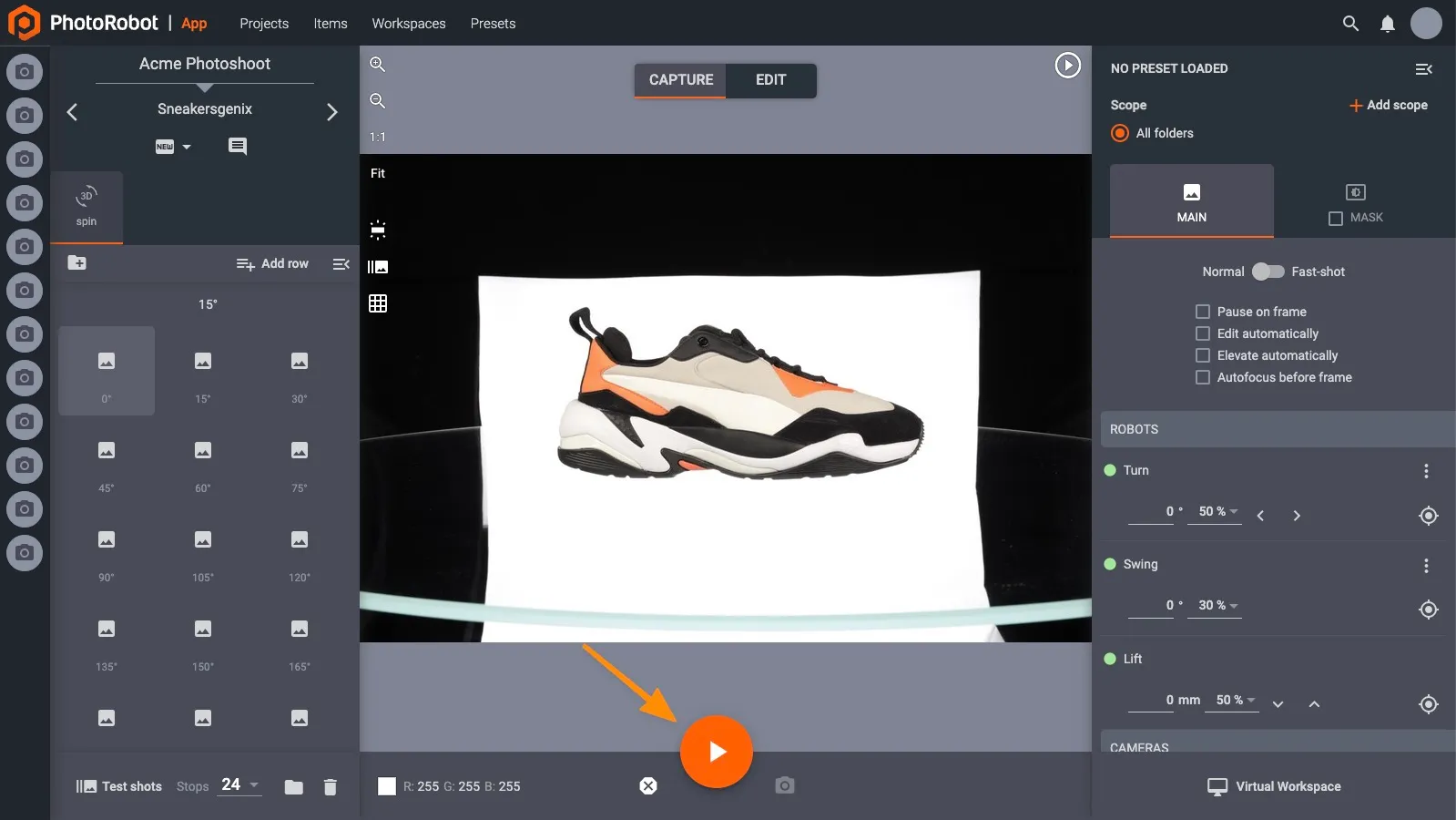
Valokuvausjakson aloittaminen
Kun olet tyytyväinen asetuksiin, jotka vahvistettiin ottamalla testikuva, on aika suorittaa valokuvausjakso. Tämä voidaan käynnistää painamalla näppäimistön välilyöntiä tai napsauttamalla alla olevassa kuvassa näkyvää "Käynnistä" -painiketta.
Jos sinulla on viivakoodinlukija, voit käynnistää sarjan myös skannaamalla erityisen "käynnistys"-viivakoodin. Lataa PhotoRobot "start" -viivakoodi verkosta ja tulosta se käyttääksesi tätä ominaisuutta.

Tiedät, että sekvenssi on päättynyt onnistuneesti, jos kaikki vasemmanpuoleiset pikkukuvat on täytetty kuvilla. On hyvä käytäntö kiinnittää huomiota strobovalojen mahdollisiin sytytysvirheisiin.
Jos jokin pikkukuvista on tummempi kuin muut, laske pyörimisnopeutta tai tarkista tarvittaessa valojen kunto. Tämän jälkeen voit merkitä nämä kuvat ja kuvata ne uudelleen ilman, että sinun tarvitsee suorittaa koko sarja uudelleen.
Kun sieppausjakso on valmis, voit siirtyä muokkaustilaan, jossa suoritat jälkikäsittelyn.
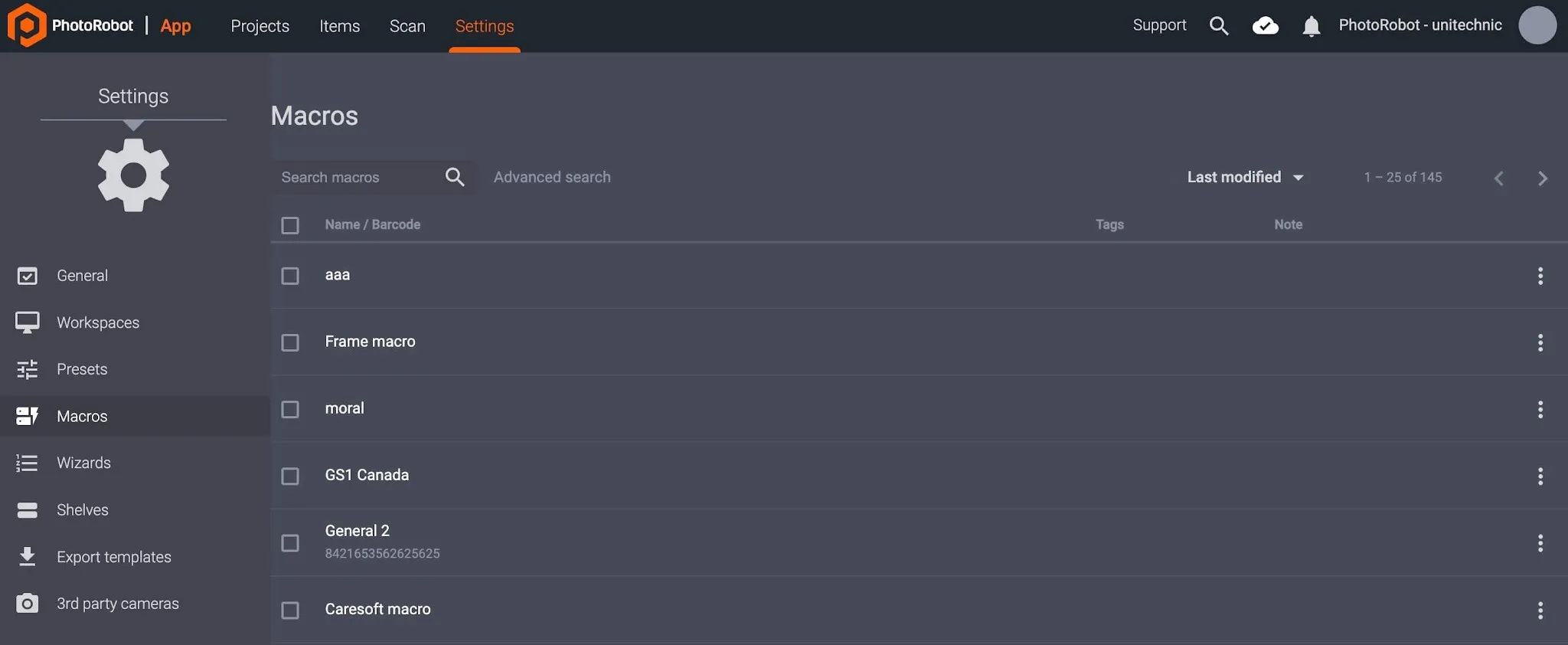
PhotoRobot Makrot
CAPP: n makrojen avulla käyttäjät voivat määrittää komentoja kohteen ja sen kansioiden sieppausprosessille (spin, still-kuvat jne.). Komennot voivat koskea yksittäisiä tai useita kansioita, suorittaa sarjoja, kuvanmuokkauksia, työtiloja, esiasetuksia, kopioida kuva-asetuksia ja siirtää kuva-asetuksia. Käyttäjät voivat myös mukauttaa makroja nimen, viivakoodin, tunnisteen tai muistiinpanojen mukaan.
Huom: Yksityiskohtaiset ohjeet PhotoRobot-makrojen määritykseen ja käyttöön löytyvät PhotoRobot-makrojen käyttöoppaasta. Ota selvää, miten makrot mahdollistavat valokuvauksen automaation taian useissa kansioissa ja komponenteissa monimutkaisten tehtävien automaattisella käsittelyllä.
PhotoRobot Ohjattu toiminto -tila
Ohjattu tila CAPPissa toimii vaihtoehtona manuaaliselle laitteisto-, kamera- ja sekvenssikokoonpanolle. Käytössä ohjattu tila antaa järjestelmänvalvojalle tai valokuvaajalle mahdollisuuden luoda erilaisia ohjattuja toimintoja yksinkertaistaakseen kuvaustilaa tuotantolinjan operaattoreille. Operaattori voi sitten käynnistää CAPPin ohjatussa tilassa, joka toimii erittäin yksinkertaisena käyttöliittymänä ohjattujen vaiheiden kanssa. Käytön helppoutta ja perehdyttämistä varten on myös rajoitetut säätimet.
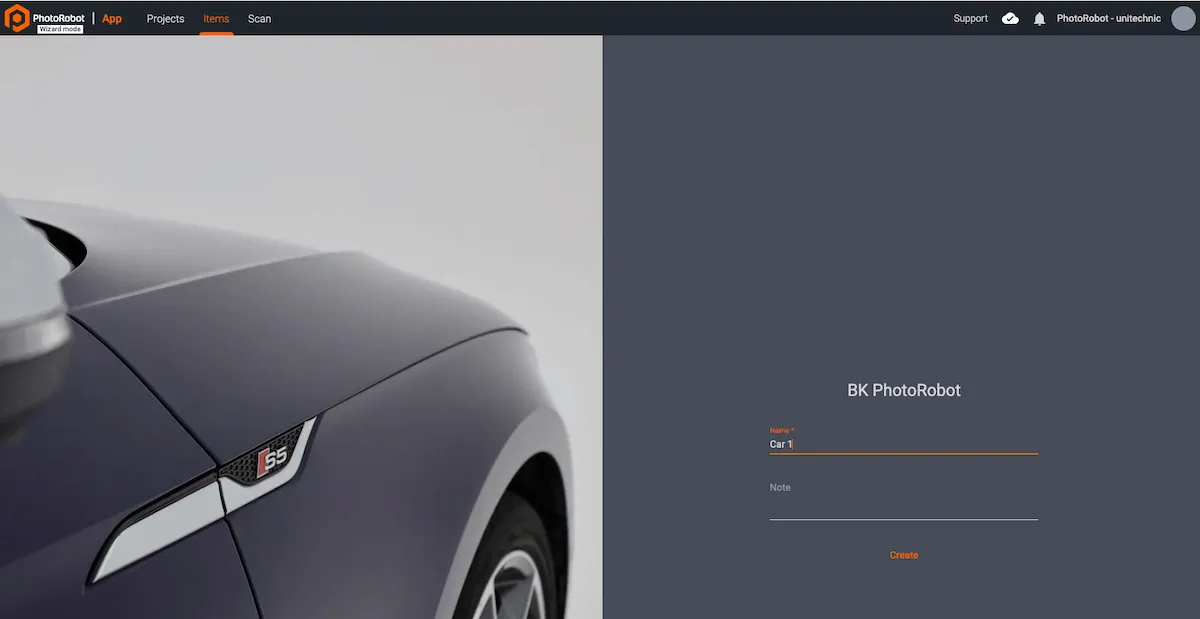
Ohjatun toiminnon luomisen jälkeen se tallentaa Presets- ja Workspace-kokoonpanot sekä ennalta määritellyt vaiheet, joita käyttäjien on noudatettava. Käyttäjät eivät voi säätää mitään asetuksia, ja heidän on suoritettava kunkin vaiheen ohjeet ennen kuin he voivat siirtyä seuraavaan prosessiin.
Huomautus: Ohjattujen toimintojen vaiheet määritellään JavaScriptin kaltaisessa kielimuodossa, ja PhotoRobot-konsultit ohjelmoivat ne mukautettuja toimintoja varten. Käyttäjät voivat myös ohjelmoida perustoimintoja alkuperäisiä kokeiluja tai yksinkertaisia asennuksia varten. Ohjattujen toimintojen teknisen kokoonpanon ja käyttäjän käytön dokumentaatio löytyy osoitteesta PhotoRobot Wizard Mode -käyttöopas.
Muokkaa tilan käyttöliittymää
Näytön oikealla puolella voit lisätä minkä tahansa määrän muokkaustoimintoja:
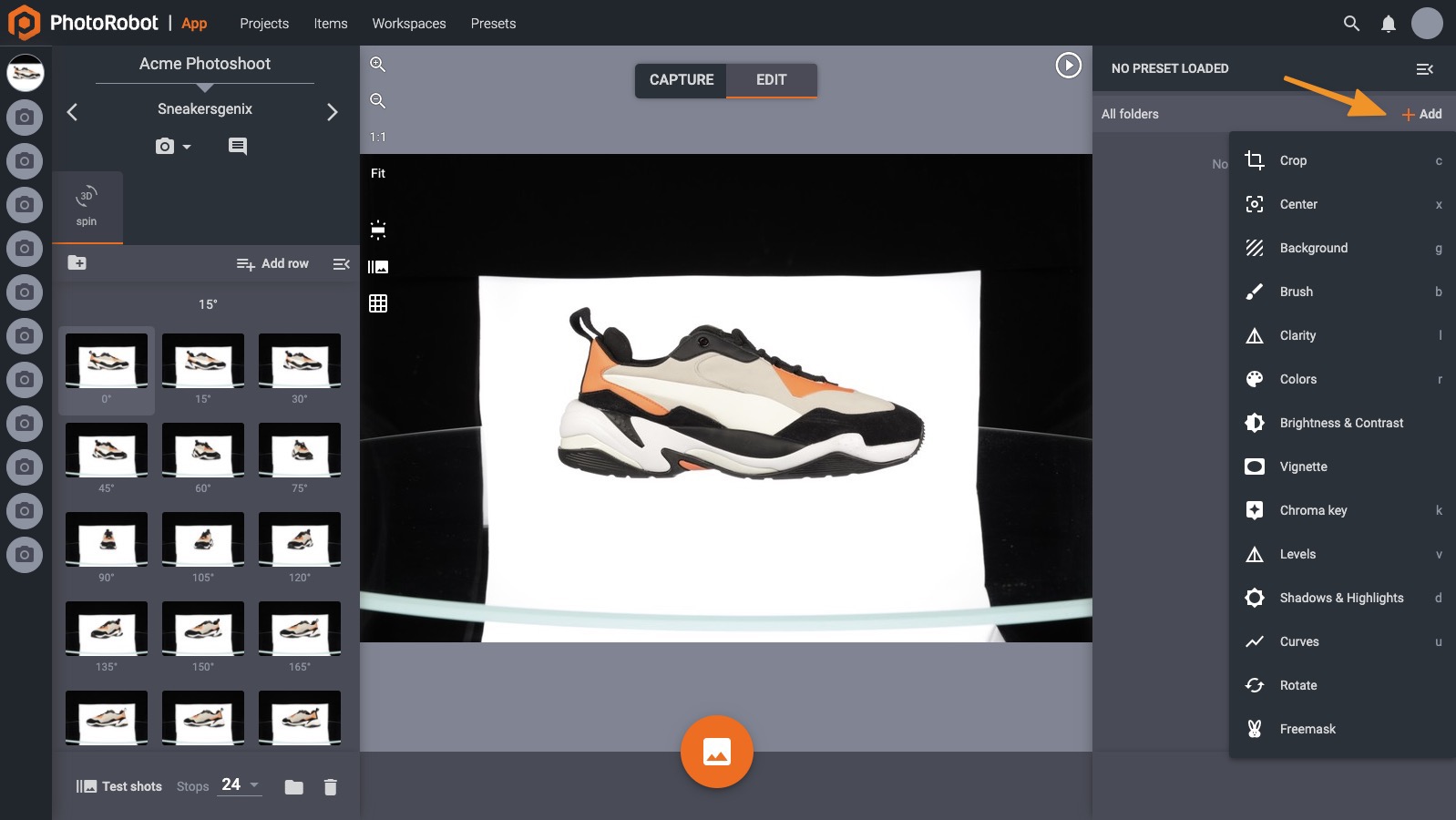
Yläosassa on lueteltu joitakin yleisimpiä muokkaustoimintoja: rajaus, keskikohta ja tausta.
Automaattinen rajaus
Rajaa - kuvia rajattaessa on kolme pääsäädintä: automaattisen rajauksen, kuvasuhteen ja täytön kytkimet (mikä ohjaa, kuinka paljon tilaa valokuvatun objektin ympärillä on).

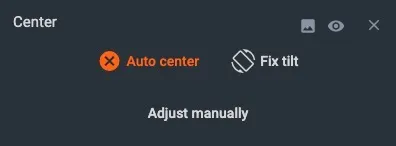
Automaattinen keskitin
Keskus - vaikka useimmat PhotoRobot-koneet on varustettu lasereilla, jotka auttavat esineiden sijoittamisessa pinnalle, useimmat kuvat tarvitsevat lisäohjelmistojen keskittämistä. Tämä on erityisen tärkeää 360° kierroksille. Kun aloitat, on suositeltavaa pitää "Automaattinen keskitä" -toiminto päällä, kuten alla olevasta kuvasta näkyy:
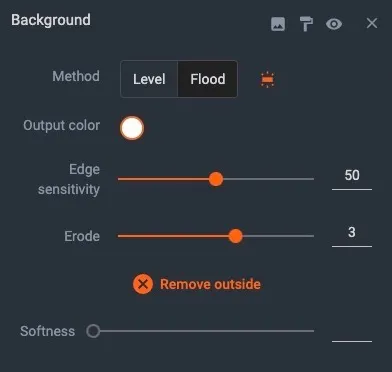
Taustan poistaminen
Taustatoiminto säätää kuvan tai kuvajoukon taustaa ja poistaa taustan kokonaan haluttaessa. CAPP:n kolmella eri taustanpoistomenetelmällä voidaan saavuttaa erilaisia tuloksia. Taustan poisto on tasoittain, taustan poisto tulvalla ja vapaanaamioinnilla.
- Taustan poisto tasoittain käyttää RGB-väritasojen ja kirkkausarvojen ohjelmistoanalyysiä taustan ja etualan tunnistamiseen. Tämä on eduksi kuvattaessa kirkkaita tai valkoisia esineitä ja käytettäessä valkoista taustaa. Säädä ohjelmiston tasoja niin, että taustan kirkkaus kasvaa, kunnes se muuttuu puhtaan valkoiseksi. Tämän jälkeen on mahdollista tehdä taustasta läpinäkyvä tai vaihtaa erivärisiä taustoja.
- Taustan poisto tulvalla toimii samoilla periaatteilla kuin tasokohtainen taustan poisto, ja se on useimmiten hyödyllinen kuvattaessa tummempia kohteita. Taustan poistaminen tulvatoiminnolla tekee taustan kirkkaudesta voimakkaamman, kunnes se muuttuu puhtaan valkoiseksi kohteen ympärillä. Tasojen säätämisen sijaan työkalu käyttää valittua pistettä taustan tunnistamiseen ja "tulvii" sitten kyseisen alueen. Käyttäjät napsauttavat vain kuvattavan kohteen ulkopuolella olevaa kohtaa. Ohjelmisto tunnistaa sitten kohteen reunat ja käyttää tulvaa täyttääkseen sen ympärillä olevan tilan.
- Taustan vapaa peittäminen vaatii enemmän määrityksiä kuin tasojen tai tulvan käyttäminen, mutta se voi olla yksi tarkimmista ja nopeimmista menetelmistä. Tämä menetelmä käyttää leikattua maskikuvaa ja tuotteen pääkuvaa, joka sommittelee kaksi kuvaa taustan poistamiseksi . Joskus tämä on ainoa tehokas tapa poistaa tausta "vaikeampien" kohteiden ympäriltä. Otetaan esimerkiksi heijastavat esineet tai esineet, joissa on tyhjää tilaa. Vapaamaskaus tunnistaa objektin verrattuna kaikkeen tyhjään tilaan ja poistaa tarvittaessa taustan kohteen ympäriltä ja sen sisältä. Menetelmä vaatii kuitenkin studiovalojen lisäkonfigurointia, jotta pää- ja maskikuvat voidaan luoda taustan poistamista varten.
Muistiinpano: Muista, että se, pystyykö CAPP poistamaan taustan vai ei, riippuu pääasiassa siitä, miten kohtaus on valaistu. Jos et löydä tyydyttäviä asetuksia, ota kuvat uudelleen eri valoasetuksilla.
Kun olet tyytyväinen muokkausasetuksiisi, käytä parametreja napsauttamalla "käytä" -painiketta, joka sijaitsee aiemmin "Käynnistä" -painike.
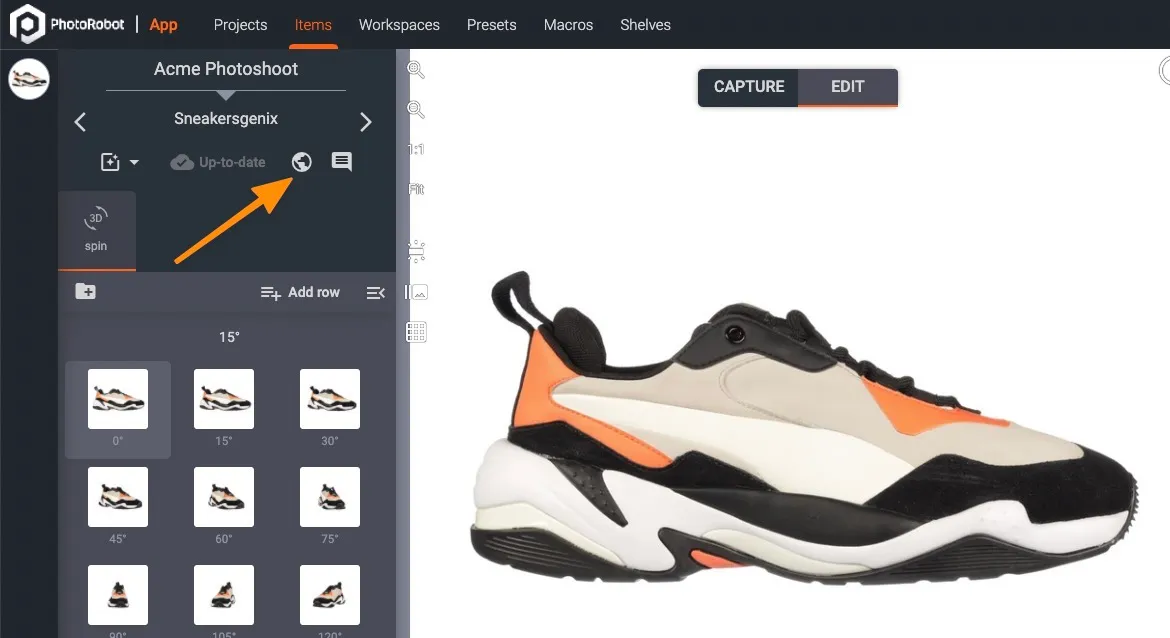
Kuvien julkaiseminen
Kun edistymispalkki on päättynyt, muokkauksiasi on sovellettu kuviin onnistuneesti. Jos käytät CAPP:tä ilman PhotoRobot pilvipalveluja, tuloksena olevat kuvat tallennetaan paikallisen aseman kansiorakenteeseen.
Jos käytät PhotoRobot Cloud -isännöintiä, tiedostot löytyvät myös PhotoRobot pilvitallennustilasta. Jos haluat käyttää niitä, klikkaa Avaa pilvessä näytön vasemmassa yläkulmassa olevassa Valokuvat-osiossa.
Viedään kuvia
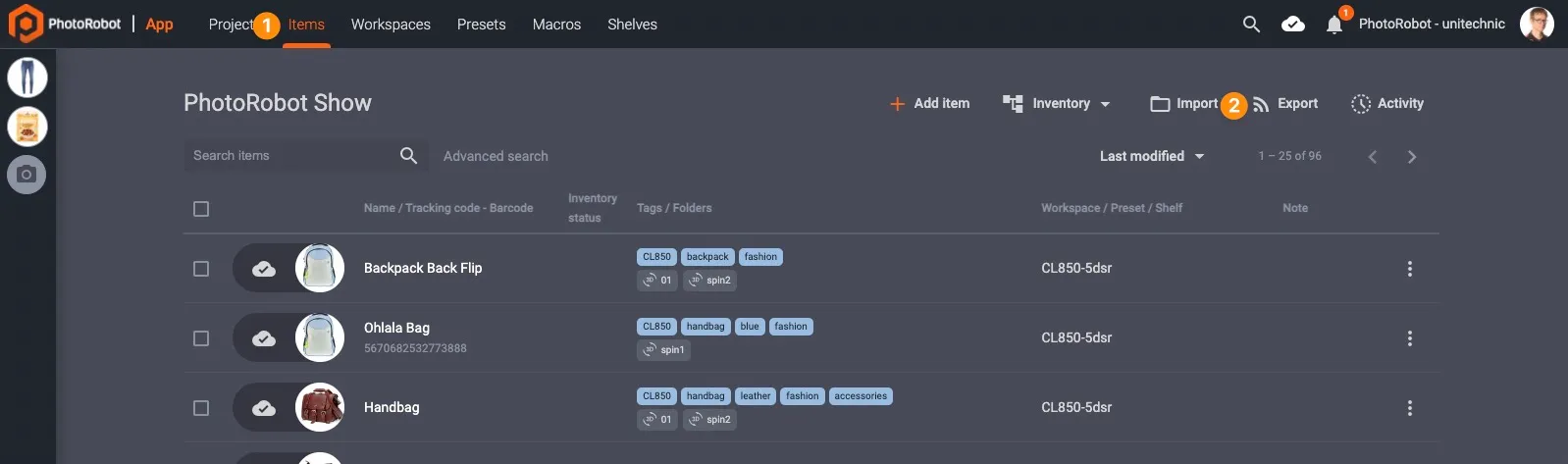
Jos haluat viedä kohteen CAPP:stä, käyttäjät voivat viedä sen paikalliselle levylle tai PhotoRobot Cloudiin. Kohteiden viennin avulla voidaan määrittää kohteita mukautetuilla nimeämiskäytännöillä, määrittää kuvamuoto, tarkkuus ja erilaiset tiedostonimimallin muuttujat.
Pääset kohteen vientiasetuksiin siirtymällä Kohteet-osioon ja napsauttamalla kohdeluettelon yläpuolella olevassa valikossa Vie:
Seuraava ikkuna avautuu, jolloin voit muuttaa vientiasetuksia:
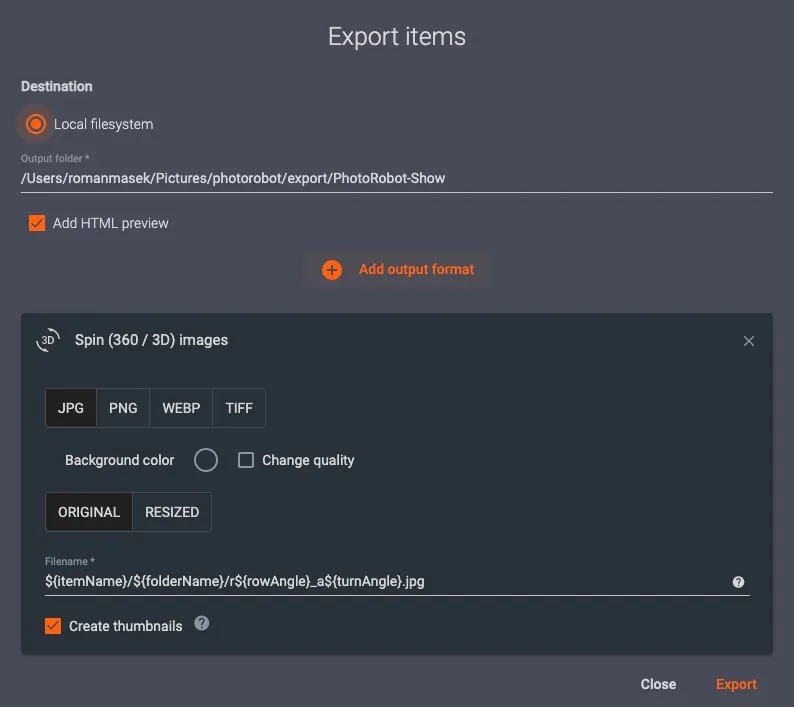
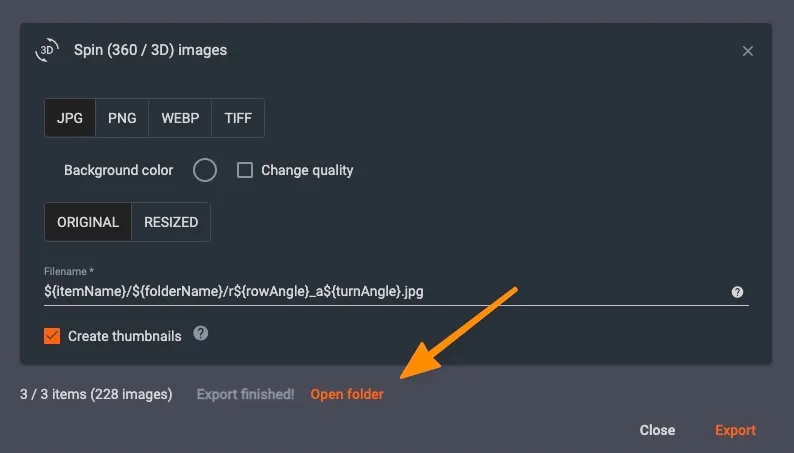
Suorita vientiprosessi napsauttamalla vie-painiketta tämän ikkunan oikeassa alakulmassa.
Kun viennin edistymispalkki on päättynyt, voit käyttää vietyjä kuvia valitsemalla Avaa kansio .
Julkaise pilven kautta
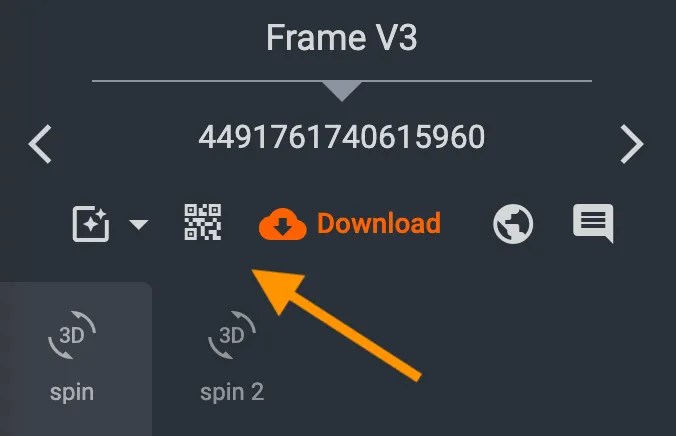
Jos julkaiset PhotoRobot pilvipalvelujen kautta, avaa kohde ensin pilvessä. Käyttöliittymä näyttää siepatun kuvan. Klikkaa Koodit ja linkit -painike:
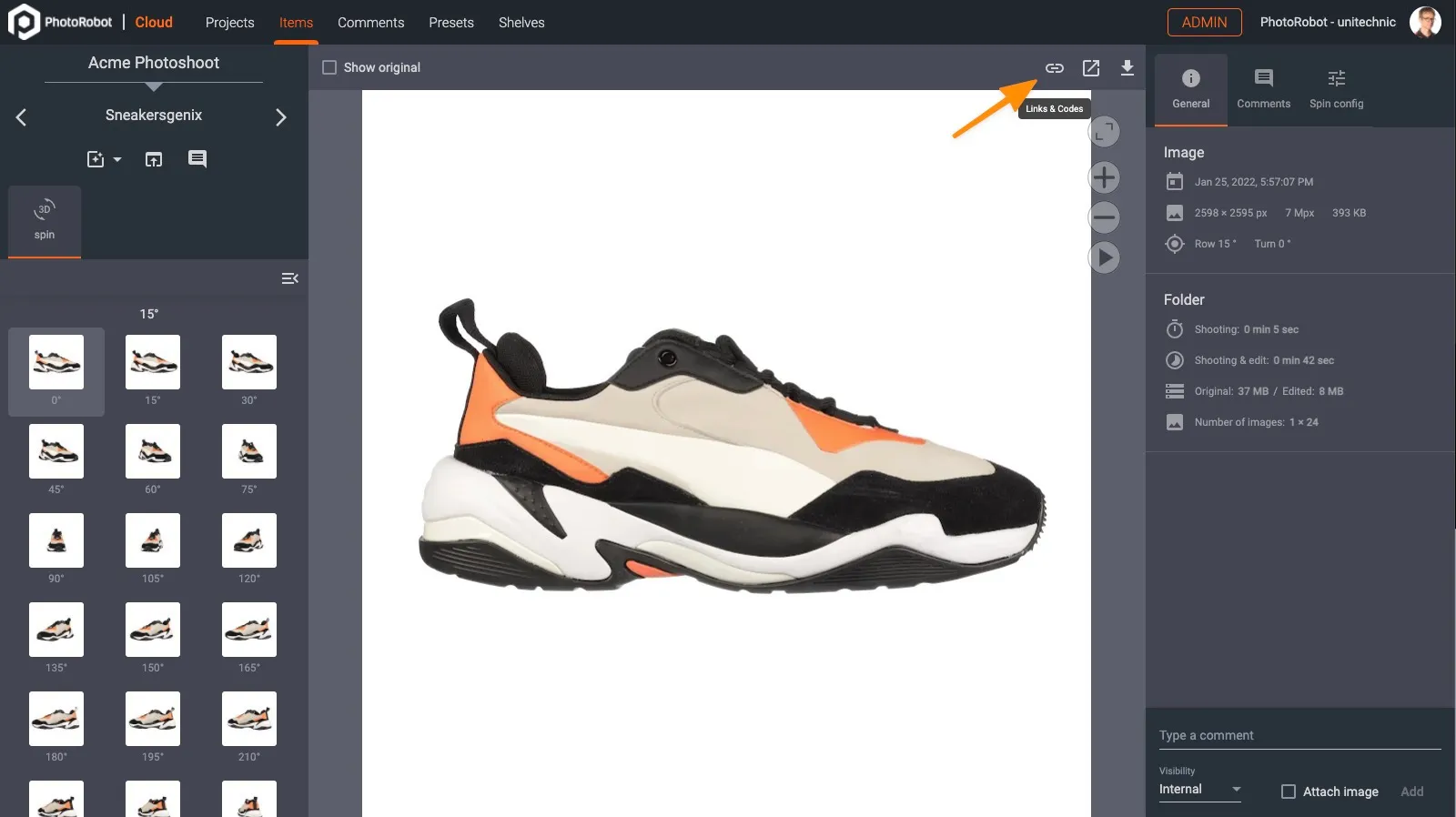
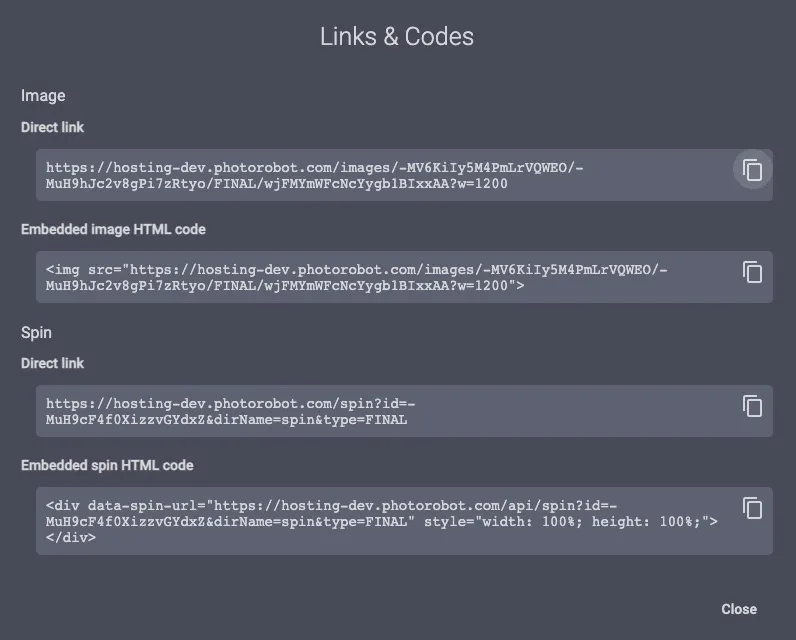
Kopioi Suora linkki ja liitä se selaimeesi nähdäksesi kuvan tai linkouksen. Liitä tämä koodi sivullesi, jos haluat upottaa pyörityksen näytölle.


EOS Rebel -sarja


EOS-DSLR-sarja


Peilitön EOS M -sarja


PowerShot-sarja


Lähikuva / Kädessä pidettävä

Canon EOS Rebel -sarja tarjoaa aloittelijaystävällisiä DSLR-kameroita, joissa on vankka kuvanlaatu, intuitiiviset säätimet ja monipuoliset ominaisuudet. Nämä kamerat ovat ihanteellisia valokuvauksen harrastajille, ja niissä on luotettava automaattitarkennus, kääntyvät kosketusnäytöt ja Full HD- tai 4K-videotallennus.
Yhteys
Resoluutio (MP)
Päätöslauselma
Canon EOS DSLR -sarja tarjoaa korkealaatuisia kuvia, nopean automaattitarkennuksen ja monipuolisuuden, joten se sopii erinomaisesti sekä valokuvaukseen että videotuotantoon.
Yhteys
Resoluutio (MP)
Päätöslauselma
Peilittömässä Canon EOS M -sarjassa yhdistyvät kompakti muotoilu ja DSLR-kameran suorituskyky. Vaihdettavilla linsseillä, nopealla automaattitarkennuksella ja korkealaatuisilla kuvakennoilla varustetut kamerat sopivat erinomaisesti matkailijoille ja sisällöntuottajille, jotka etsivät siirrettävyyttä kuvanlaadusta tinkimättä.
Yhteys
Resoluutio (MP)
Päätöslauselma
Canon PowerShot -sarja tarjoaa pienikokoisia ja käyttäjäystävällisiä kameroita satunnaisille ampujille ja harrastajille. Mallit vaihtelevat yksinkertaisista osoita ja ammu -kameroista edistyneisiin zoom-kameroihin, joten ne tarjoavat mukavuutta, vankkaa kuvanlaatua ja ominaisuuksia, kuten kuvanvakaimen ja 4K-videon.
Yhteys
Resoluutio (MP)
Päätöslauselma
Canonin lähikuva- ja kädessä pidettävät kamerat on suunniteltu yksityiskohtaisiin lähikuvauksiin ja videoihin. Ne ovat pienikokoisia ja helppokäyttöisiä, ja niissä on tarkka tarkennus, korkearesoluutioinen kuvantaminen ja monipuoliset makro-ominaisuudet, jotka sopivat täydellisesti vloggaamiseen, tuotekuvaukseen ja luoviin lähikuviin.
Yhteys
Resoluutio (MP)
Päätöslauselma


