PhotoRobot SynchroBox - Toiminnallisuus ja asennus käyttöohje

Seuraava dokumentaatio kuvaa PhotoRobot SynchroBoxin toiminnallisuutta ja asennusta, Monikameran ohjainta, joka tukee PhotoRobot MultiCamia. Tämän tiedon tarkoituksena on tukea PhotoRobotin asiakkaita, jotka ovat äskettäin ostaneet laitteen ja käyttävät useampaa kuin yhtä kameraa PhotoRobotin kanssa. SynchroBox toimii monikamerakeskittimenä, joka synkronoi kahden tai useamman kameran sulkimen. Lue eteenpäin ymmärtääksesi SynchroBoxin teoriaa, toiminnallisuutta ja asennusta, jotta laitteen perusymmärrys ja ensimmäinen käyttö helpottuvat.
Tärkeää: PhotoRobot-järjestelmän alkuperäisen asennuksen saa aina suorittaa valtuutettu PhotoRobot-viranomainen. PhotoRobot-asennukseen valtuutetut viranomaiset ovat hyväksytty jakelija tai valmistajan edustaja. Lisäksi tutustu aina PhotoRobotin turvallisuustietoihin & ohjeisiin sekä laitteesi mukana toimitettuun käyttöoppaaseen ennen PhotoRobotin ensimmäistä käyttöä.
Huom: Ohjeet PhotoRobot MultiCam -laitteen kokoamiseen ja ensimmäiseen käyttöön löytyvät osoitteesta PhotoRobot MultiCam ja Centerless Table -asennus.
SynchroBoxin tekninen käyttöopas
Kiitos ja onnittelut PhotoRobot-ostostasi. PhotoRobot edustaa vuosikymmenten ensikäden ammatillista kokemusta ja innovaatioita automatisoidussa valokuvauksessa. Jokainen laite tarjoaa valmiiden ratkaisujen ekosysteemin, jonka ominaisuudet räätälöidään yrityksesi ainutlaatuisten tarpeiden mukaan.
Tervetuloa PhotoRobot-sivustolle. Käytä seuraavia teknisiä tietoja aloittaaksesi matkasi kohti tuotannon ymmärtämistä ja maksimoimista PhotoRobot-toimivassa studiossa.
1. PhotoRobot SynchroBox – Teoria
PhotoRobot SynchroBox tarvitaan kameran sulkimen synkronointiin, kun käytetään kahta tai useampaa kameraa PhotoRobot-järjestelmien kanssa. SynchroBox toimii monikamerakeskuksena, joka synkronoi yksittäisten kuvien tallennuksen eri kameroilla juuri oikealla hetkellä. Se on ratkaisu ongelmaan, joka ilmenee eri suljinviiveillä varustettujen kameroiden kanssa, ja tukee yhteensä jopa kahdeksaa kameraa.
SynchroBoxin teorian ymmärtämiseksi otetaan esimerkiksi tavallisen kaappaustilan ja nopean pyörimisen tallennustilan sekvenssit PhotoRobot:lla.
Tavallisessa kaappaustilassa on seuraava sekvenssi.
a) Levy liikkuu haluttuun kulmaan.
b) Kilpi pysähtyy.
c) Kamera valokuvaa esineen.
d) Levy alkaa siirtyä seuraavaan kulmaan.
Tässä tilanteessa ei tarvitse säätää.
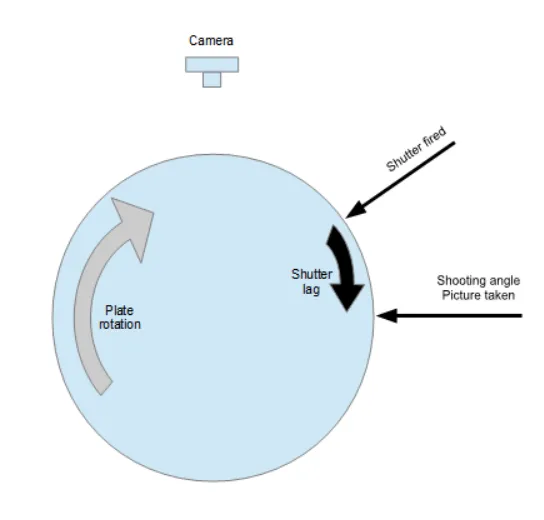
Nopean pyörähdyksen kaappaustilassa sekvenssi vaatii useita lisävaiheita.
a) Levy alkaa pyöriä ennalta määritellyllä nopeudella.
b) Ohjausyksikkö tunnistaa lähestyvän kuvakulman.
c) Ohjausyksikkö laukaisee kameran sulkimen etukäteen suljinkaapelin kautta.
d) Kamera käynnistää tallennusprosessin (kennon verhojen liike jne.).
e) Tallennusprosessi vaatii noin 50 millisekuntia ("suljinviive").
f) Levy on jatkuvasti liikkeessä suljinviiveen aikana.
g) Levy saavuttaa halutun kulman täsmälleen, kun kameran suljinviive on päättynyt, ottaen kuvan.
h) Ohjausyksikkö tunnistaa, että seuraava kuvauskulma lähestyy, toistaen kuvausprosessin suljinviiveen osalta.
i) Levyn pyöriminen päättyy 360 asteen jälkeen, jolloin kaikki liike pysähtyy.
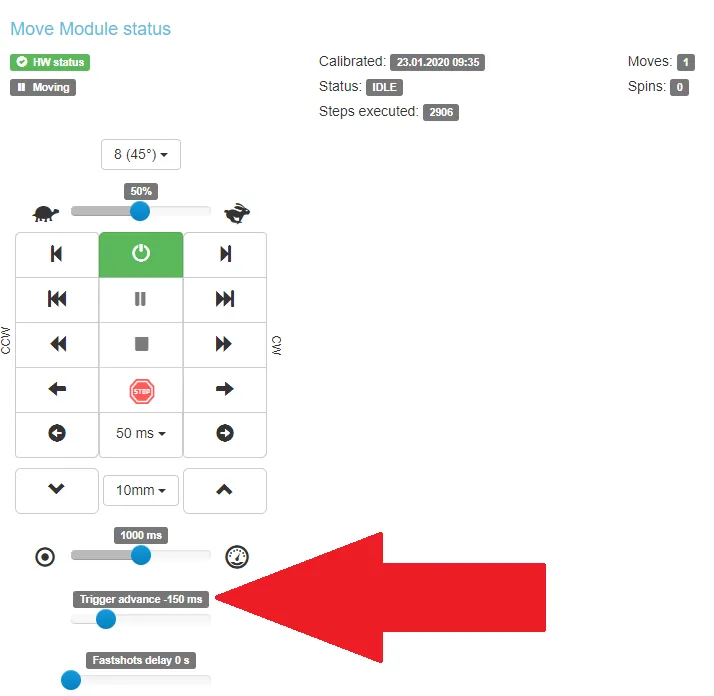
Muistiinpano: Koska jokaisella kameralla on erilainen suljinviive, on tarpeen säätää Control Unit -suljinaikaa kullekin kameralle. Tämä on mahdollista ohjausyksikölle (sukupolvi 6) sen palvelukäyttöliittymän kautta käyttämällä vaihtoehtoa "Trigger advance". "Trigger advance" -arvon on oltava suurempi kuin kameran suljinviive. Esimerkiksi, jos kameran suljinviive on 80 ms, niin "liipaisimen etenemisen" tulisi olla suunnilleen yhtä suuri tai suurempi kuin 90 ms.
2. Laitteen kuvaus - PhotoRobot SynchroBox
Suunnittelultaan SynchroBox on räkkikiinnitettävä laite, joka on suunniteltu synkronoimaan kahden tai useamman kameran sulkimet. Se on tarpeellinen, kun PhotoRobot-järjestelmää käytetään useammalla kuin yhdellä kameralla samanaikaisesti. Yksi SynchroBox tukee jopa kahdeksaa kameraa, tarjoten ratkaisun erilaisten kameroiden suljinviiveiden kiertämiseen.


Otetaan esimerkiksi tilanne, jossa molempien kameroiden jakajana on vain kaksi kameraa ja SynchroBox, ilman lisäasetuksia. Samaan aikaan Control Unit G6:n "Trigger advance" -arvo on nolla. Suljin käynnistetään, kun levy saavuttaa halutun kulman.
Tässä tapauksessa jonon vaiheet ovat:
a) Levy saavuttaa halutun kulman.
b) Ohjausyksikkö laukaisee kameran sulkimen suljinkaapelin kautta.
c) Molempien kameroiden suljinviive laskee alaspäin levyn ollessa jatkuvassa liikkeessä.
d) Ensimmäinen kamera ottaa kuvan 50 ms halutun tallennuspisteen jälkeen käyttäen "haluttua kulmaa + X" astetta.
e) Toinen kamera tallentaa kuvan 70 ms halutun tallennuspisteen jälkeen käyttäen "haluttu kulma + Y" -asteita.
f) "Y"-arvoasteet ovat suurempia kuin "X"-arvon asteet.
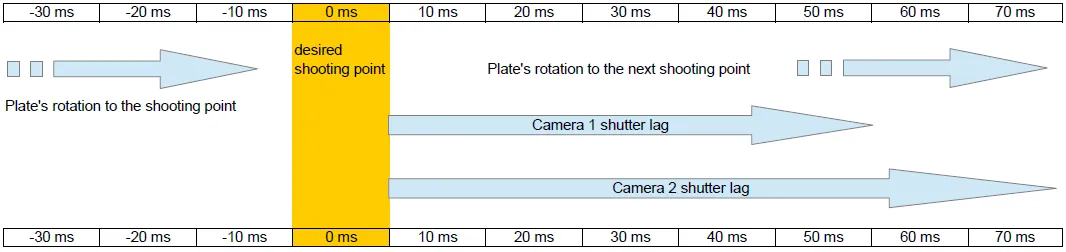
Tämän seurauksena halutusta kulmasta ei saatu kuvaa. Siksi säätö on tarpeen, jotta molemmat kamerat kuvaavat halutun tallennuspisteen oikealla hetkellä.
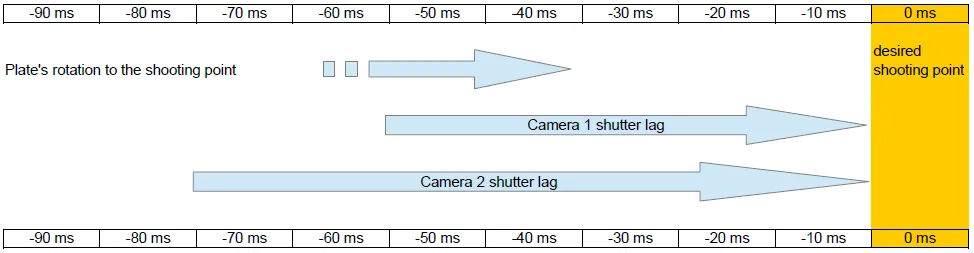
Tätä varten SynchroBox vastaanottaa Control Unit G6:lta "suljin laukaistu" -pulssin ja tunnistaa automaattisesti pulssin pituuden.
Lisäksi SynchroBoxissa on suljinviive jokaiselle liitetylle kameralle, joka syötettiin manuaalisesti asetuksen yhteydessä.
Näiden kahden parametrin avulla SynchroBox laskee ja laukaisee kummankin kameran sulkimen sopivalla etunopeudella.
3. Kuinka mitata kameran suljinviive
Kameran suljinviiveen mittaamiseksi tarvitaan PhotoRobot, jossa on mikä tahansa pyörivä levy, Control Unit G6+ sekä kamera, joka on kytketty suljinkaapelilla ohjausyksikköön.
Seuraavaksi kameraan täytyy liittää paikallinen tietokone, jossa on PhotoRobot Controls -sovellusohjelmisto, USB-kaapelin kautta.
Lopuksi tarvitaan 360 asteen kulma (ladattavissa verkosta) seuraavien vaiheiden suorittamiseksi.
a) Aseta kulmaputki PhotoRobot-laitelevylle, käyttäen mitä tahansa osoitinta, joka on asetettu levyn ulkopuolelle ja osoittaa reunaan.
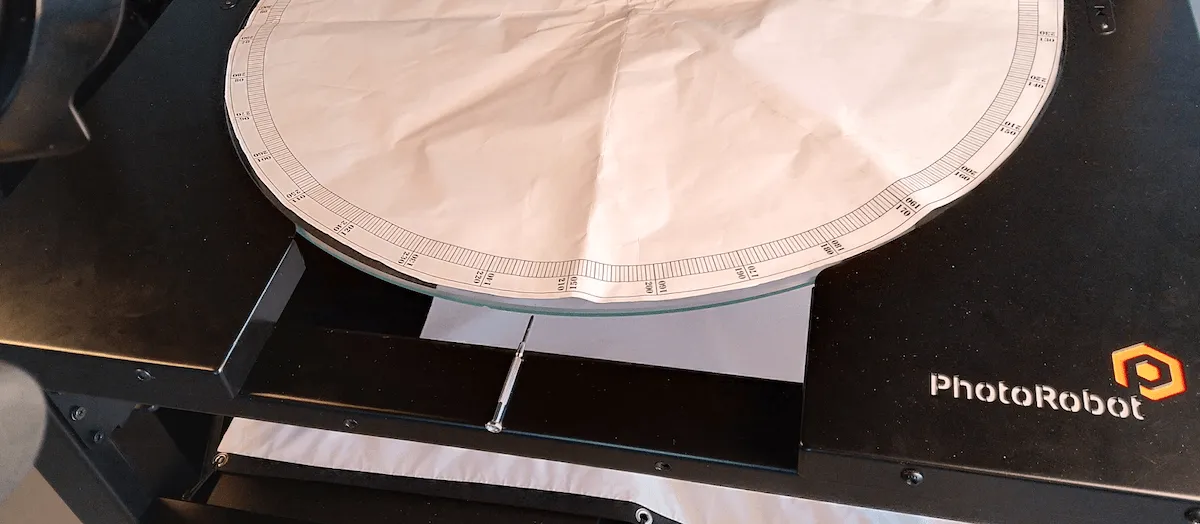
b) Käännä levyä, kunnes osoitin on nollassa. Huomautus: Tämä vaihe on mahdollista käsin, vaikka sähkömoottorit olisivat pois päältä.
c) Käynnistä PhotoRobot Controls -sovellusohjelmisto, kirjaudu tilillesi ja luo kohde työtilassa ottaen huomioon annetun asetuksen. Avaa sitten Capture-tila ja avaa kansio "Muut".
d) Seuraavaksi avaa selaimesi uudessa välilehdessä Control Unitin (G6) palvelugraafinen, joka ohjaa levyä IP-osoitteen perusteella.
e) Palvelukäyttöliittymässä aseta robotti seuraavilla parametreilla:
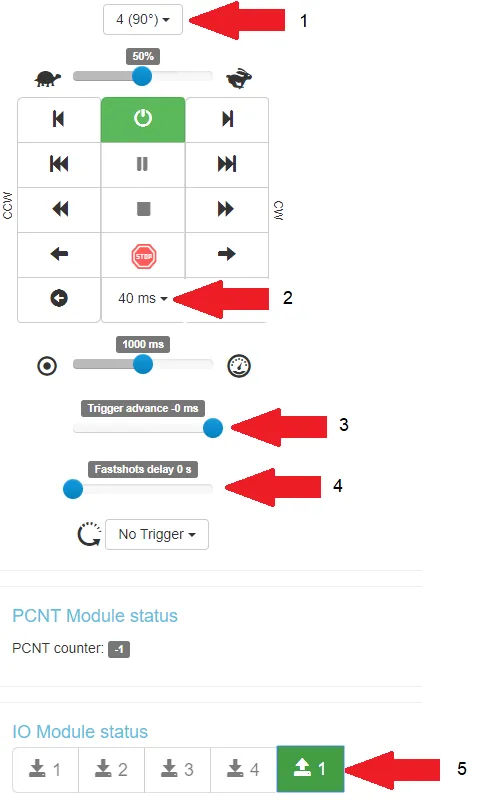
- 1 = 4 kuvaa 90 asteen kulmasta;
- 2 = 40 ms pulssin pituus sulkimen laukaisuun;
- 3 = laukaisimen eteneminen 0 ms (ei etenemistä);
- 4 = ei nopeita laukauksia viivettä
- 5 = sulkimen puolipainallus aktivoituu
f) Aloita sekvenssi klikkaamalla oikeaa nuolta ohjauspaneelin oikeassa alakulmassa:
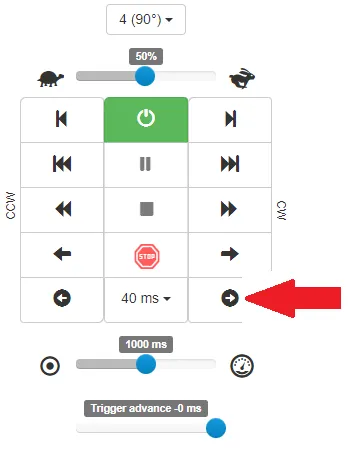
Muistiinpano: Sarja alkaa 90 asteesta ja päättyy 0 asteeseen. Samaan aikaan kaikki kuvat tallennetaan Control-sovelluksen kansioon "Muut", kuten aiemmin on konfiguroitu.
Esimerkiksi katso seuraavat esimerkkilähtökohdat (pyörivä suunta vasemmalle):
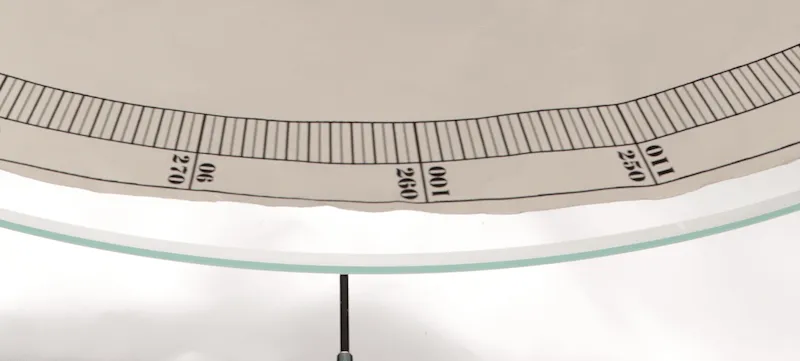
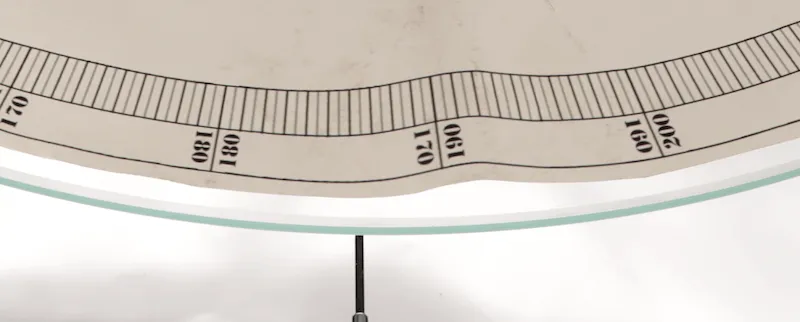
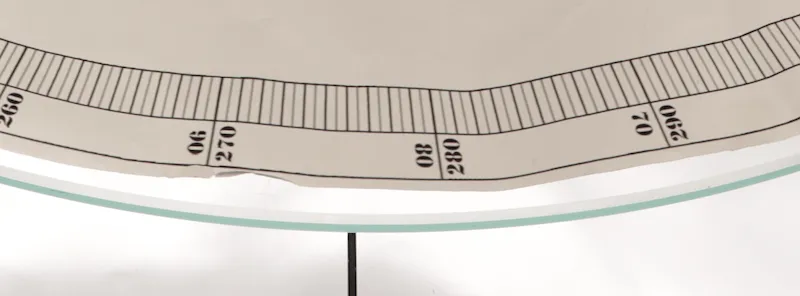
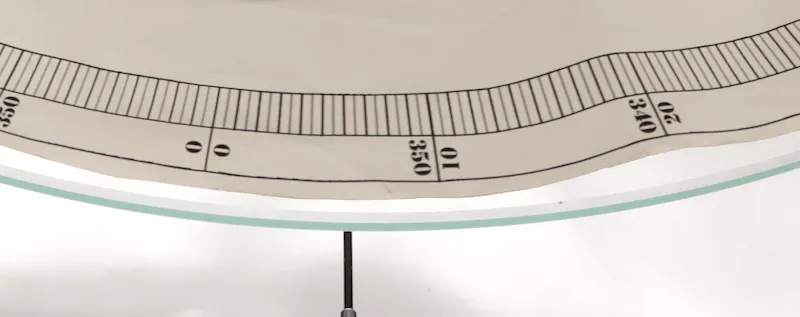
- Muistiinpano: Näissä esimerkeissä kuvankaappaus tapahtui noin 6 asteen kulmassa liipaisimen laukaisemisen jälkeen.
g) Seuraavaksi, jotta 6 astetta voidaan muuntaa millisekuntien määräksi (ms), aloitetaan PhotoRobot-levyn jatkuva pyöritys samalla nopeudella kuin edellisessä vaiheessa palvelukäyttöliittymässä.
- Käynnistä sekuntikello ja tallenna 10 kierroksen aika.
- Tässä testitapauksessa tuloksena oleva arvo on 61 sekuntia (61 000 ms).
- Se tarkoittaa, että 10 laukausta vastaa 10 * 360 astetta (3 600 astetta).
- Aikaliike on 1 aste, joka kestää 61 000 ms / 3 600 astetta, mikä vastaa 16,94 ms.
- Aikaliike on 6 astetta, joka kestää 16,94 ms * 6, mikä vastaa 101,64 ms.
- Näin ollen likimääräinen suljinviive on noin 102 ms.
h) Lopuksi on tarpeen toistaa kaikki aiemmat vaiheet, jotta voidaan tunnistaa suljinviive jokaiselle käytettävälle kameralle.
4. SynchroBox-asennus
SynchroBoxin asennuksessa edellytys on, että ohjausyksikkö (G6) on asennettu ja täysin toiminnassa. Lisäksi ihanteellisesti on kaksi tai useampia saman valmistajan ja saman mallin kameraa, joilla jokaisella on tunnettu suljinviive.
Tässä tapauksessa käytä seuraavia vaiheita SynchroBoxin asettamiseen.
4.1. Yhdistä SynchroBox Control Unit G6:een suljinkaapelilla. Huomautus: Tämä suljinkaapeli toimitetaan PhotoRobot:n toimesta osana SynchroBox-toimitusta tai osanumerolla KHCAR1R05. Suljinkaapeli yhdistää Control Unit G6 "OUT"-portin SynchroBoxin "->IN"-porttiin (pienempi, ei toinen "=>IN").
4.2. Yhdistä SynchroBox verkkoon tavallisella ethernet-kaapelilla, käyttäen samaa aliverkkoa, joka yhdistyy Control Unitiin.
4.3. Yhdistä kaikki toiminnassa olevat kamerat SynchroBoxiin suljinkaapeleilla.
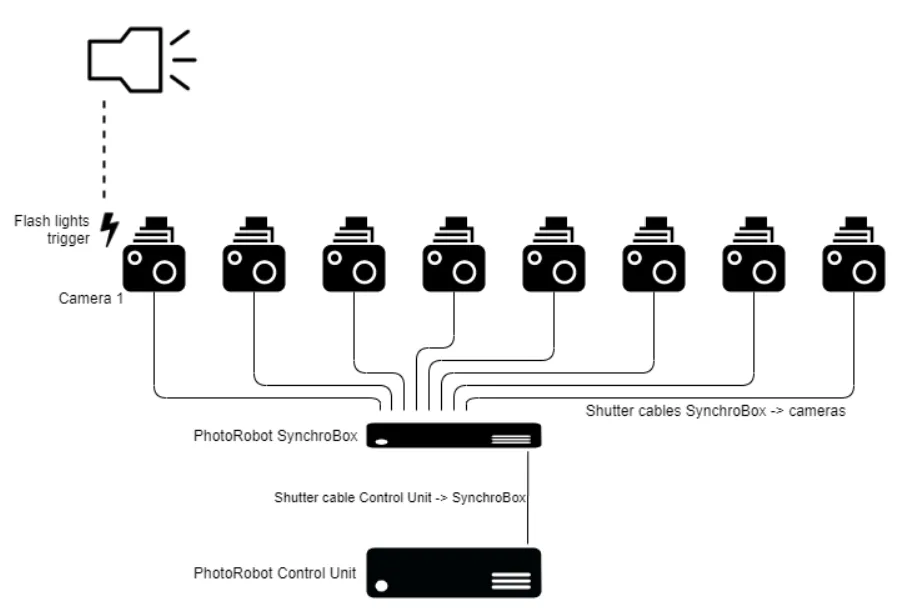
Muistiinpano: SynchroBoxin suljinkaapelit kameroihin toimitetaan PhotoRobot:n toimesta osanumeroilla KHCARCJ (Canon Jack 2,5 mm Connector) tai KHCARN3 (Canon N3 -liitin) sekä jatke KHCAR1R05, tai niin sanottuna suljinkaapelisarjana.

4.4. Huomioi, että kamera 1 (SynchroBoxin portti 1) pitää ja käyttää taskulamppujen laukaisulaitetta. Tässä kamerassa täytyy olla suurin suljinviive.
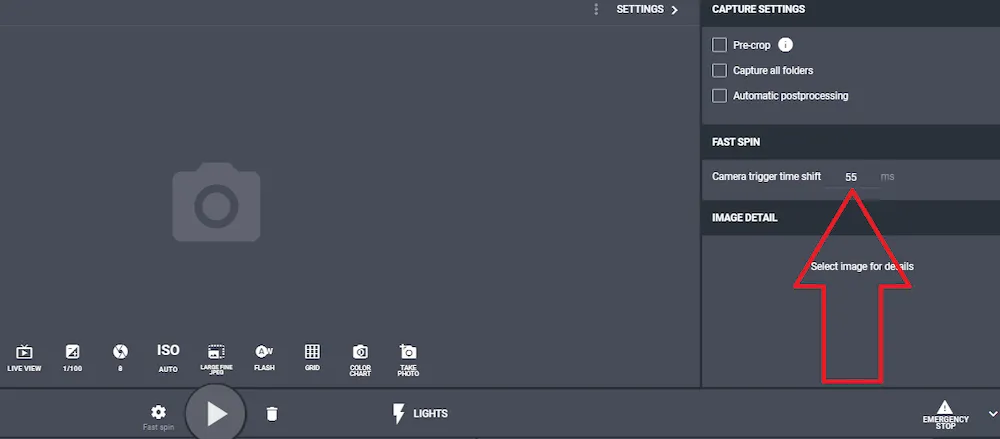
4.5. Aseta ohjausyksikön (G6) "Trigger advance" -arvo hitaimman kameran suljinviiveen mukaan (aiemmin kuvattu tämän asiakirjan kohdassa 1). Huomautus: Kun käytät PhotoRobot Controls -sovellusta, huomioi, että tämä arvo säädetään / korvataan Capture-tilan arvolla – Fast Spin:
4.6. Seuraavaksi pääse SynchroBoxin palvelun käyttöliittymään syöttämällä sen IP-osoite URL-muodossa selaimeesi.
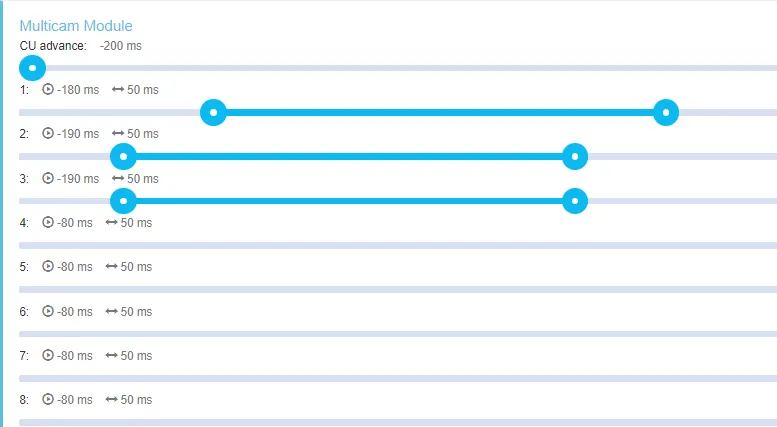
4.7. Aseta ensimmäinen liukusäädin "CU advance" samaan arvoon kuin Control Unitissa tai vastaavaksi arvoksi PhotoRobot Controlsissa. Huomautus: Huomioi, että jos nämä kaksi arvoa eroavat, PhotoRobot Controlsin arvo menee etusijalle. Sitten on 8 liukusäädintä, jotka vastaavat SynchroBoxin kahdeksaa porttia. Liukusäätimillä on kaksi arvoa: eteneminen (vasen painike) ja pulssin pituus (oikea painike). Edistynyt arvo vastaa ohjattavan kameran suljinviivettä (pienin reaaliarvo noin -50 ms). Pulssin pituus liittyy sitten siihen aikarajaan, jonka aikana kameran suljinkaapeli pitää kontaktia. Tämän arvon antaa kameran valmistaja, tai jos sitä ei tiedetä, se voidaan asettaa 40–60 ms:iin.
4.8. Aseta tulokanava SynchroBox-palvelun käyttöliittymään. Huomautus: Kun käytät PhotoRobot'n suljinkaapeleita, asetus on aina seuraava.
- SATAMASSA: A = tarkennus, B = laukaisu
- Portti 1 - 8: A = laukaisin, B = tarkennus
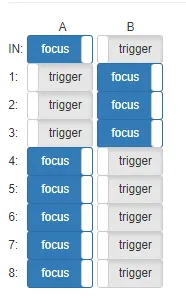
- Huomaa, että yllä olevassa esimerkissä on asennettuna vain kamerat 1, 2 ja 3.
- Koska PhotoRobot on tarkoitettu käyttämään taskulamppuja, aseta kameran 1 suljinaika arvoon 1/100 tai 1/125.
4.9. Lopuksi, säädä kaikkien muiden kameroiden alkuasetukset paljon pidempään suljinaikaan, esim. 1/30 - 1/60. Tämä auttaa ottamaan huomioon mahdolliset erot suljinviiveissä käytettyjen kameroiden välillä. Pidempi aikaväli varmistaa myös, että kaikki kamerat saavuttavat salaman huippun kaikista strobovaloista. Kun se toimii oikein, on mahdollista kokeilla tarvittaessa pienentämällä muiden kameroiden suljinnopeutta.
5. Useiden SynchroBoxien asennus
SynchroBox tukee enintään 8 kameraa. Jos tarvitaan yli 8 kameraa, on mahdollista moninkertaistaa käytössä olevien SynchroBoxien määrä.

- Yhdistä ensimmäisen SynchroBoxin OUT-portti seuraavan SynchroBoxin IN-porttiin samalla suljinkaapelilla, joka yhdistää ohjausyksikön SynchroBoxiin. Tämän suljinkaapelin toimittaa PhotoRobot osana SynchroBox-toimitusta tai osanumerolla KHCAR1R05.


EOS Rebel -sarja


EOS-DSLR-sarja


Peilitön EOS M -sarja


PowerShot-sarja


Lähikuva / Kädessä pidettävä

Canon EOS Rebel -sarja tarjoaa aloittelijaystävällisiä DSLR-kameroita, joissa on vankka kuvanlaatu, intuitiiviset säätimet ja monipuoliset ominaisuudet. Nämä kamerat ovat ihanteellisia valokuvauksen harrastajille, ja niissä on luotettava automaattitarkennus, kääntyvät kosketusnäytöt ja Full HD- tai 4K-videotallennus.
Yhteys
Resoluutio (MP)
Päätöslauselma
Canon EOS DSLR -sarja tarjoaa korkealaatuisia kuvia, nopean automaattitarkennuksen ja monipuolisuuden, joten se sopii erinomaisesti sekä valokuvaukseen että videotuotantoon.
Yhteys
Resoluutio (MP)
Päätöslauselma
Peilittömässä Canon EOS M -sarjassa yhdistyvät kompakti muotoilu ja DSLR-kameran suorituskyky. Vaihdettavilla linsseillä, nopealla automaattitarkennuksella ja korkealaatuisilla kuvakennoilla varustetut kamerat sopivat erinomaisesti matkailijoille ja sisällöntuottajille, jotka etsivät siirrettävyyttä kuvanlaadusta tinkimättä.
Yhteys
Resoluutio (MP)
Päätöslauselma
Canon PowerShot -sarja tarjoaa pienikokoisia ja käyttäjäystävällisiä kameroita satunnaisille ampujille ja harrastajille. Mallit vaihtelevat yksinkertaisista osoita ja ammu -kameroista edistyneisiin zoom-kameroihin, joten ne tarjoavat mukavuutta, vankkaa kuvanlaatua ja ominaisuuksia, kuten kuvanvakaimen ja 4K-videon.
Yhteys
Resoluutio (MP)
Päätöslauselma
Canonin lähikuva- ja kädessä pidettävät kamerat on suunniteltu yksityiskohtaisiin lähikuvauksiin ja videoihin. Ne ovat pienikokoisia ja helppokäyttöisiä, ja niissä on tarkka tarkennus, korkearesoluutioinen kuvantaminen ja monipuoliset makro-ominaisuudet, jotka sopivat täydellisesti vloggaamiseen, tuotekuvaukseen ja luoviin lähikuviin.
Yhteys
Resoluutio (MP)
Päätöslauselma


